摘要:本案例是CenterNet-Hourglass论文复现的体验案例,此模型是对Objects as Points 中提出的CenterNet进行结果复现。
本文分享自华为云社区《CenterNet-Hourglass (物体检测/Pytorch)》,作者:HWCloudAI。
目标检测常采用Anchor的方法来获取物体可能存在的位置,再对该位置进行分类,这样的做法耗时、低效,同时需要后处理(比如NMS)。CenterNet将目标看成一个点,即目标bounding box的中心点,整个问题转变成了关键点估计问题,其他目标属性,比如尺寸、3D位置、方向和姿态等都以估计的中心点为基准进行参数回归。
本案例是CenterNet-Hourglass论文复现的体验案例,此模型是对Objects as Points 中提出的CenterNet进行结果复现(原论文Table 2 最后一行)。本模型是以Hourglass网络架构作为backbone,以ExtremNet 作为预训练模型,在COCO数据集上进行50epochs的训练后得到的。本项目是基于原论文的官方代码进行针对ModelArts平台的修改来实现ModelArts上的训练与部署。
注意事项:
1.本案例使用框架:PyTorch1.4.0
2.本案例使用硬件:GPU: 1*NVIDIA-V100NV32(32GB) | CPU: 8 核 64GB
3.运行代码方法: 点击本页面顶部菜单栏的三角形运行按钮或按Ctrl+Enter键 运行每个方块中的代码
4.JupyterLab的详细用法: 请参考《ModelAtrs JupyterLab使用指导》
5.碰到问题的解决办法:请参考《ModelAtrs JupyterLab常见问题解决办法》
运行下面代码,进行数据和代码的下载和解压
本案例使用COCO数据集。
import os #数据代码下载 !wget https://obs-aigallery-zc.obs.cn-north-4.myhuaweicloud.com/algorithm/CenterNet.zip # 解压缩 os.system('unzip CenterNet.zip -d ./')复制
--2021-06-25 17:50:11-- https://obs-aigallery-zc.obs.cn-north-4.myhuaweicloud.com/algorithm/CenterNet.zip Resolving proxy-notebook.modelarts.com (proxy-notebook.modelarts.com)... 192.168.6.62 Connecting to proxy-notebook.modelarts.com (proxy-notebook.modelarts.com)|192.168.6.62|:8083... connected. Proxy request sent, awaiting response... 200 OK Length: 1529663572 (1.4G) [application/zip] Saving to: ‘CenterNet.zip’ CenterNet.zip 100%[===================>] 1.42G 279MB/s in 5.6s 2021-06-25 17:50:16 (261 MB/s) - ‘CenterNet.zip’ saved [1529663572/1529663572] 0复制
from __future__ import absolute_import from __future__ import division from __future__ import print_function root_path = './CenterNet/' os.chdir(root_path) os.system('pip install pycocotools') import _init_paths import torch import torch.utils.data from opts import opts from models.model import create_model, load_model, save_model from models.data_parallel import DataParallel from logger import Logger from datasets.dataset_factory import get_dataset from trains.train_factory import train_factory from evaluation import test, prefetch_test, image_infer USE_MODELARTS = True INFO:root:Using MoXing-v2.0.0.rc0-19e4d3ab INFO:root:Using OBS-Python-SDK-3.20.9.1 NMS not imported! If you need it, do cd $CenterNet_ROOT/src/lib/external make复制
def main(opt): torch.manual_seed(opt.seed) torch.backends.cudnn.benchmark = not opt.not_cuda_benchmark and not opt.test Dataset = get_dataset(opt.dataset, opt.task) opt = opts().update_dataset_info_and_set_heads(opt, Dataset) logger = Logger(opt) os.environ['CUDA_VISIBLE_DEVICES'] = opt.gpus_str opt.device = torch.device('cuda' if opt.gpus[0] >= 0 else 'cpu') print('Creating model...') model = create_model(opt.arch, opt.heads, opt.head_conv) optimizer = torch.optim.Adam(model.parameters(), opt.lr) start_epoch = 0 if opt.load_model != '': model, optimizer, start_epoch = load_model( model, opt.load_model, optimizer, opt.resume, opt.lr, opt.lr_step) Trainer = train_factory[opt.task] trainer = Trainer(opt, model, optimizer) trainer.set_device(opt.gpus, opt.chunk_sizes, opt.device) print('Setting up data...') train_loader = torch.utils.data.DataLoader( Dataset(opt, 'train'), batch_size=opt.batch_size, shuffle=True, num_workers=opt.num_workers, pin_memory=True, drop_last=True ) print('Starting training...') best = 1e10 for epoch in range(start_epoch + 1, opt.num_epochs + 1): mark = epoch if opt.save_all else 'last' log_dict_train, _ = trainer.train(epoch, train_loader) logger.write('epoch: {} |'.format(epoch)) for k, v in log_dict_train.items(): logger.scalar_summary('train_{}'.format(k), v, epoch) logger.write('{} {:8f} | '.format(k, v)) save_model(os.path.join(opt.save_dir, 'model_last.pth'), epoch, model) logger.write('\n') if epoch in opt.lr_step: save_model(os.path.join(opt.save_dir, 'model_{}.pth'.format(epoch)), epoch, model, optimizer) lr = opt.lr * (0.1 ** (opt.lr_step.index(epoch) + 1)) print('Drop LR to', lr) for param_group in optimizer.param_groups: param_group['lr'] = lr logger.close()复制
训练需要一点时间,请耐心等待
if __name__ == '__main__': opt = opts().parse() if USE_MODELARTS: pwd = os.getcwd() print('Copying dataset to work space...') print('Listing directory: ') print(os.listdir()) if not os.path.exists(opt.save_dir): os.makedirs(opt.save_dir) main(opt) if USE_MODELARTS: print("Processing model checkpoints & service config for deployment...") if not opt.eval: infer_dir = os.path.join(opt.save_dir, 'model') os.makedirs(infer_dir) os.system(f'mv ./trained_model/* {infer_dir}') pretrained_pth = os.path.join(infer_dir, '*.pth') ckpt_dir = os.path.join(opt.save_dir, 'checkpoints') os.makedirs(ckpt_dir) os.system(f'mv {pretrained_pth} {ckpt_dir}') pth_files = os.path.join(opt.save_dir, '*.pth') infer_pth = os.path.join(ckpt_dir, f'{opt.model_deploy}.pth') os.system(f'mv {pth_files} {ckpt_dir}') os.system(f'mv {infer_pth} {infer_dir}') print(os.listdir(opt.save_dir)) print("ModelArts post-training work is done!") Fix size testing. training chunk_sizes: [8] The output will be saved to ./output/exp/ctdet/default Copying dataset to work space... Listing directory: ['pre-trained_weights', '.ipynb_checkpoints', 'coco_eval.py', 'train.py', 'coco', 'output', 'training_logs', 'trained_model', '_init_paths.py', '__pycache__', 'coco_classes.py', 'lib', 'evaluation.py'] heads {'hm': 80, 'wh': 2, 'reg': 2} Creating model... loaded ./trained_model/epoch_50_mAP_42.7.pth, epoch 50 Setting up data... ==> initializing coco 2017 train data. loading annotations into memory... Done (t=0.54s) creating index... index created! Loaded train 5000 samples Starting training... /home/ma-user/anaconda3/envs/Pytorch-1.4.0/lib/python3.6/site-packages/torch/nn/_reduction.py:43: UserWarning: size_average and reduce args will be deprecated, please use reduction='sum' instead. warnings.warn(warning.format(ret)) ctdet/default| train: [1][0/625] |loss 1.7568 |hm_loss 1.3771 |wh_loss 1.9394 |off_loss 0.1857 |Data 0.384s (0.384s) |Net 5.019s (5.019s) ctdet/default| train: [1][200/625] |loss 1.9275 |hm_loss 1.4429 |wh_loss 2.7269 |off_loss 0.2119 |Data 0.001s (0.003s) |Net 0.759s (0.779s) ctdet/default| train: [1][400/625] |loss 1.9290 |hm_loss 1.4430 |wh_loss 2.7423 |off_loss 0.2118 |Data 0.001s (0.002s) |Net 0.760s (0.770s) ctdet/default| train: [1][600/625] |loss 1.9276 |hm_loss 1.4397 |wh_loss 2.7623 |off_loss 0.2117 |Data 0.001s (0.002s) |Net 0.765s (0.767s) Processing model checkpoints & service config for deployment... ['model', 'logs_2021-06-25-17-51', 'opt.txt', 'checkpoints'] ModelArts post-training work is done!复制
# -*- coding: utf-8 -*- # TODO 添加模型运行需要导入的模块 import os import torch import numpy as np from PIL import Image from io import BytesIO from collections import OrderedDict import cv2 import sys sys.path.insert(0, './lib') from opts import opts from coco_classes import coco_class_map from detectors.detector_factory import detector_factory class ModelClass(): def __init__(self, model_path): self.model_path = model_path # 本行代码必须保留,且无需修改 self.opt = opts().parse() self.opt.num_classes = 80 self.opt.resume = True self.opt.keep_res = True self.opt.fix_res = False self.opt.heads = {'hm': 80, 'wh': 2, 'reg': 2} self.opt.load_model = model_path self.opt.mean = np.array([0.40789654, 0.44719302, 0.47026115], dtype=np.float32).reshape(1, 1, 3) self.opt.std = np.array([0.28863828, 0.27408164, 0.27809835], dtype=np.float32).reshape(1, 1, 3) self.opt.batch_infer = False # configurable varibales: if 'BATCH_INFER' in os.environ: print('Batch inference mode!') self.opt.batch_infer = True if 'FLIP_TEST' in os.environ: print('Flip test!') self.opt.flip_test = True if 'MULTI_SCALE' in os.environ: print('Multi scale!') self.opt.test_scales = [0.5,0.75,1,1.25,1.5] self.device = torch.device("cuda" if torch.cuda.is_available() else "cpu") if not torch.cuda.is_available(): self.opt.gpus = [-1] self.class_map = coco_class_map() torch.set_grad_enabled(False) Detector = detector_factory[self.opt.task] self.detector = Detector(self.opt) print('load model success') def predict(self, file_name): image = Image.open(file_name).convert('RGB') img = np.array(image) img = img[:, :, ::-1] results = self.detector.run(img)['results'] image = cv2.cvtColor(np.asarray(image),cv2.COLOR_RGB2BGR) if not self.opt.batch_infer: for c_id, dets in results.items(): for det in dets: if det[4] > self.opt.vis_thresh: scores = str(round(float(det[4]), 4)) classes = self.class_map[c_id] image = cv2.rectangle(image,(int(det[0]),int(det[1])),(int(det[2]),int(det[3])),(0,255,0),2) image = cv2.putText(image,classes+':'+scores,(int(det[0]),int(det[1])),cv2.FONT_HERSHEY_SIMPLEX,0.7,(0,0,255),2) else: for c_id, dets in results.items(): for det in dets: scores = str(round(float(det[4]), 4)) classes = self.class_map[c_id] image = cv2.rectangle(image,(int(det[0]),int(det[1])),(int(det[2]),int(det[3])),(0,255,0),2) image = cv2.putText(image,classes+':'+scores,(int(det[0]),int(det[1])),cv2.FONT_HERSHEY_SIMPLEX,0.5,(0,0,255),2) return image复制
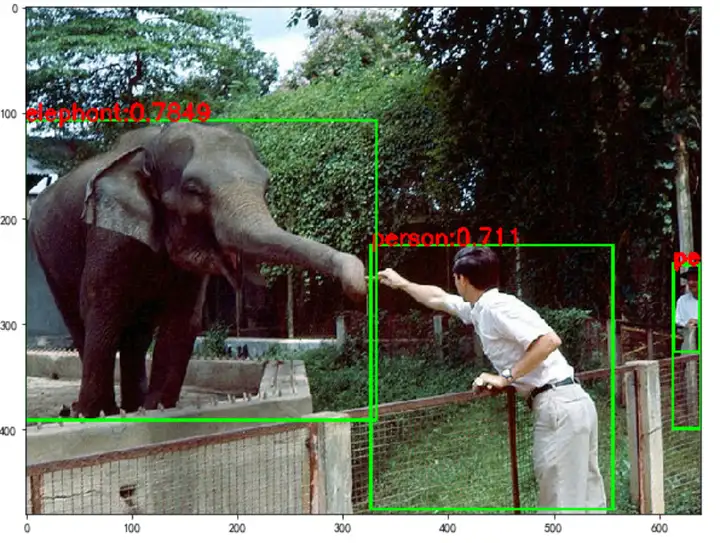
可以自行修改预测的图像路径
if __name__ == '__main__': import matplotlib.pyplot as plt img_path = './coco/train/000000021903.jpg' model_path = './output/exp/ctdet/default/model/model_last.pth' #模型的保存路径,你可以自己找一下 # 以下代码无需修改 my_model = ModelClass(model_path) result = my_model.predict(img_path) result = Image.fromarray(cv2.cvtColor(result,cv2.COLOR_BGR2RGB)) plt.figure(figsize=(10,10)) #设置窗口大小 plt.imshow(result) plt.show()复制
Fix size testing. training chunk_sizes: [8] The output will be saved to ./output/exp/ctdet/default Creating model... loaded ./output/exp/ctdet/default/model/model_last.pth, epoch 1 load model success复制