摘要:通过本教程,我们学习了另一类客流统计应用——过线客流统计,通常用于室内出入口,摄像头会架设在高处俯拍,使用头肩部检测可以减少人与人之间的遮挡。
本文分享自华为云社区《客流分析之基于头肩部检测的过线客流统计》,作者:HiLens_feige 。
除了划区域客流统计之外,另一类常见的客流统计场景是过线客流统计,本文介绍基于头肩部检测的过线客流统计技能:采用头肩部检测人形并进行跟踪,当头肩部中心点跨过事先划定的线段时,增加客流计数;过线前后的人形将使用不同颜色的框表示,画面中也会实时显示客流数量。
本文将使用华为云ModelArts进行人形检测模型的训练,并使用ModelBox框架进行应用开发,使用前开发者需要完成如下准备工作:
这个应用对应的ModelBox版本已经做成模板放在华为云OBS中,可以用sdk中的solution.bat工具下载,接下来我们给出该应用在ModelBox中的完整开发过程:
执行.\solution.bat -l可看到当前公开的技能模板:
PS ███> .\solution.bat -l ... Solutions name: mask_det_yolo3 ... passenger_flow_head_det_yolo7复制
结果中的passenger_flow_head_det_yolo7即为基于头肩部检测的过线客流统计应用模板,可使用如下命令下载模板:
PS ███> .\solution.bat -s passenger_flow_head_det_yolo7 ...复制
solution.bat工具的参数中,-l 代表list,即列出当前已有的模板名称;-s 代表solution-name,即下载对应名称的模板。下载下来的模板资源,将存放在ModelBox核心库的solution目录下。
在ModelBox sdk目录下使用create.bat创建passenger_flow工程
PS ███> .\create.bat -t server -n passenger_flow -s passenger_flow_head_det_yolo7 sdk version is modelbox-xxx success: create passenger_flow in ███\modelbox\workspace复制
create.bat工具的参数中,-t 表示创建事务的类别,包括工程(server)、Python功能单元(Python)、推理功能单元(infer)等;-n 代表name,即创建事务的名称;-s 代表solution-name,表示将使用后面参数值代表的模板创建工程,而不是创建空的工程。
workspace目录下将创建出passenger_flow工程,工程内容如下所示:
passenger_flow |--bin │ |--main.bat:应用执行入口 │ |--mock_task.toml:应用在本地执行时的输入输出配置,此应用默认使用本地视频文件为输入源,最终结果输出到另一本地视频文件,可根据需要修改 |--CMake:存放一些自定义CMake函数 |--data:存放应用运行所需要的图片、视频、文本、配置等数据 │ |--passenger_flow.mp4:客流统计测试用视频文件 │ |--simsun.ttc:中文字体库 |--dependence │ |--modelbox_requirements.txt:应用运行依赖的外部库在此文件定义,本应用依赖pillow工具包 |--etc │ |--flowunit:应用所需的功能单元存放在此目录 │ │ |--cpp:存放C++功能单元编译后的动态链接库,此应用没有C++功能单元 │ │ |--draw_passenger_bbox:客流画图功能单元 │ │ |--object_tracker:目标跟踪功能单元 │ │ |--yolov7_post:头肩部检测使用的是YOLO7模型,此处即为后处理功能单元 |--flowunit_cpp:存放C++功能单元的源代码,此应用没有C++功能单元 |--graph:存放流程图 │ |--passenger_flow.toml:默认流程图,使用本地视频文件作为输入源 │ |--modelbox.conf:modelbox相关配置 |--hilens_data_dir:存放应用输出的结果文件、日志、性能统计信息 |--model:推理功能单元目录 │ |--head_detection:头肩部检测推理功能单元 │ │ |--head_detection.toml:头肩部检测推理功能单元的配置文件 │ │ |--head_det_yolo7_lite_224x352.onnx:头肩部检测onnx模型 |--build_project.sh:应用构建脚本 |--CMakeLists.txt |--rpm:打包rpm时生成的目录,将存放rpm包所需数据 |--rpm_copyothers.sh:rpm打包时的辅助脚本复制
passenger_flow工程graph目录下存放流程图,默认的流程图passenger_flow.toml与工程同名,其内容为(以Windows版ModelBox为例):
[driver] # 功能单元的扫描路径,包含在[]中,多个路径使用,分隔 # ${HILENS_APP_ROOT} 表示当前应用的实际路径 # ${HILENS_MB_SDK_PATH} 表示ModelBox核心库的实际路径 dir = [ "${HILENS_APP_ROOT}/etc/flowunit", "${HILENS_APP_ROOT}/etc/flowunit/cpp", "${HILENS_APP_ROOT}/model", "${HILENS_MB_SDK_PATH}/flowunit", ] skip-default = true [profile] # 通过配置profile和trace开关启用应用的性能统计 profile = false # 是否记录profile信息,每隔60s记录一次统计信息 trace = false # 是否记录trace信息,在任务执行过程中和结束时,输出统计信息 dir = "${HILENS_DATA_DIR}/mb_profile" # profile/trace信息的保存位置 [flow] desc = "passenger detection using head-shoulder detection with yolov7 for local video or rtsp video stream" # 应用的简单描述 [graph] format = "graphviz" # 流程图的格式,当前仅支持graphviz graphconf = """digraph passenger_flow { node [shape=Mrecord] queue_size = 4 batch_size = 1 # 定义节点,即功能单元及其属性 input1[type=input,flowunit=input,device=cpu,deviceid=0] data_source_parser[type=flowunit, flowunit=data_source_parser, device=cpu, deviceid=0] video_demuxer[type=flowunit, flowunit=video_demuxer, device=cpu, deviceid=0] video_decoder[type=flowunit, flowunit=video_decoder, device=cpu, deviceid=0, pix_fmt="rgb"] resize[type=flowunit flowunit=resize device=cpu deviceid="0" image_width=352, image_height=224] color_transpose[type=flowunit flowunit=packed_planar_transpose device=cpu deviceid="0"] normalize[type=flowunit flowunit=normalize device=cpu deviceid="0" standard_deviation_inverse="0.0039215686,0.0039215686,0.0039215686"] head_detection[type=flowunit flowunit=head_detection device=cpu deviceid="0"] yolov7_post[type=flowunit flowunit=yolov7_post device=cpu deviceid="0"] object_tracker[type=flowunit, flowunit=object_tracker, device=cpu, deviceid=0] draw_passenger_bbox[type=flowunit, flowunit=draw_passenger_bbox, device=cpu, deviceid=0] video_out[type=flowunit flowunit=video_out device=cpu deviceid="0"] # 定义边,即功能间的数据传递关系 input1:input -> data_source_parser:in_data data_source_parser:out_video_url -> video_demuxer:in_video_url video_demuxer:out_video_packet -> video_decoder:in_video_packet video_decoder:out_video_frame -> resize:in_image resize:out_image -> color_transpose:in_image color_transpose:out_image -> normalize:in_data normalize:out_data -> head_detection:input head_detection:output -> yolov7_post:in_feat yolov7_post:out_data -> object_tracker:in_bbox object_tracker:out_track -> draw_passenger_bbox:in_track video_decoder:out_video_frame -> draw_passenger_bbox:in_image draw_passenger_bbox:out_image -> video_out:in_video_frame }"""复制
整个应用逻辑比较简单,视频解码后做图像预处理,接着是头肩部检测,模型后处理得到头肩框,送入跟踪算法进行实时跟踪与过线判断,最后将跟踪信息画到图像输出到视频中。
本应用的核心逻辑是跟踪与过线判断,体现在 object_tracker 功能单元中,它是一个Stream功能单元,Stream功能单元的概念和案例可以参考 ModelBox AI应用开发——Stream功能单元 。
object_tracker 功能单元的实现代码在object_tracker.py和easy_tracker.py文件中,目标跟踪算法 EasyTracker 根据IoU使用贪心法进行匹配,过线判断逻辑在object_tracker.py的 get_tracking_objects 函数中:
def get_tracking_objects(self, line_y): '''从跟踪器中获取跟踪目标,保存到结构化数据中''' def _is_pass_line(bbox, line_y): '''根据检测框的中心点与线段的水平位置关系判断是否过线''' center_y = (bbox[1] + bbox[3]) / 2 return center_y > line_y tracking_objects = [] # 所有跟踪目标 for track in self.tracker.tracks: # 只记录CONFIRMED状态的跟踪目标 if track.state != EasyTracker.TrackingState.CONFIRMED: continue tracking_obj = {} # 使用字典保存跟踪目标 tracking_obj["id"] = track.track_id # 跟踪id tracking_obj["bbox"] = track.det # 跟踪框 if not track.passline and _is_pass_line(track.det, line_y): # 刚好过线 track.passline = True self.flow_count += 1 tracking_obj["passline"] = track.passline # 记录过线信息 tracking_objects.append(tracking_obj) return tracking_objects复制
可以看到,应用做了简化处理,假设过线统计的线段为水平线段,使用检测框的中心点y坐标与线段的y坐标比较判断是否过线。此处开发者可以进行修改扩展,使得应用可以支持非水平线段的过线判断。
本应用中的画图功能单元以来 pillow 工具包以实现中文输出,ModelBox应用不需要手动安装三方依赖库,只需要配置在 dependence\modelbox_requirements.txt ,应用在编译时会自动安装。另外,中文输出还需要对应的字体库,存放在 data 目录下,画图功能单元初始化时将从此目录加载资源。
查看任务配置文件bin/mock_task.toml,可以看到其中的任务输入和任务输出配置为如下内容::
[input] type = "url" url = "${HILENS_APP_ROOT}/data/passenger_flow.mp4" # 表示输入源为本地视频文件 [output] type = "local" url = "${HILENS_APP_ROOT}/hilens_data_dir/passenger_flow_result.mp4" # 表示输出为本地视频文件复制
即,使用本地视频文件data/passenger_flow.mp4作为输入,统计过线客流后,画图输出到本地视频文件data/passenger_flow_result.mp4中。
启动应用前执行.\build_project.sh进行工程构建,该脚本将编译自定义的C++功能单元(本应用不涉及)、将应用运行时会用到的配置文件转码为Unix格式(防止执行过程中的格式错误)、安装第三方依赖库:
PS ███> .\build_project.sh ... PS ███>复制
然后执行.\bin\main.bat运行应用:
PS ███> .\bin\main.bat ...复制
运行结束后在hilens_data_dir目录下生成了passenger_flow_result.mp4文件,可以打开查看:
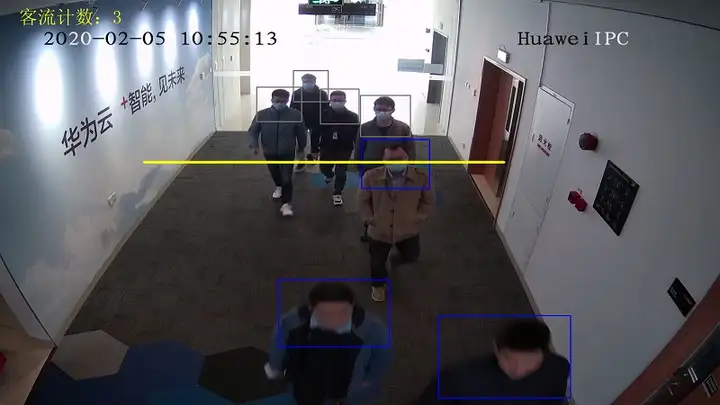
可以看到,黄色线段即为过线统计的水平线段,未过线的人使用灰色框标记其头肩部,已过线的使用蓝色框,画面左上角实时显示总的过线客流数量。
通过本教程,我们学习了另一类客流统计应用——过线客流统计,通常用于室内出入口,摄像头会架设在高处俯拍,使用头肩部检测可以减少人与人之间的遮挡。