摘要:相比于Q learning,DQN本质上是为了适应更为复杂的环境,并且经过不断的改良迭代,到了Nature DQN(即Volodymyr Mnih发表的Nature论文)这里才算是基本完善。
本文分享自华为云社区《强化学习从基础到进阶-案例与实践[4.1]:深度Q网络-DQN项目实战CartPole-v0》,作者: 汀丶 。
相比于Q learning,DQN本质上是为了适应更为复杂的环境,并且经过不断的改良迭代,到了Nature DQN(即Volodymyr Mnih发表的Nature论文)这里才算是基本完善。DQN主要改动的点有三个:
import paddle import paddle.nn as nn import paddle.nn.functional as F !pip uninstall -y parl !pip install parl import parl from parl.algorithms import DQN class MLP(parl.Model): """ Linear network to solve Cartpole problem. Args: input_dim (int): Dimension of observation space. output_dim (int): Dimension of action space. """ def __init__(self, input_dim, output_dim): super(MLP, self).__init__() hidden_dim1 = 256 hidden_dim2 = 256 self.fc1 = nn.Linear(input_dim, hidden_dim1) self.fc2 = nn.Linear(hidden_dim1, hidden_dim2) self.fc3 = nn.Linear(hidden_dim2, output_dim) def forward(self, state): x = F.relu(self.fc1(state)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x复制
from collections import deque class ReplayBuffer: def __init__(self, capacity: int) -> None: self.capacity = capacity self.buffer = deque(maxlen=self.capacity) def push(self,transitions): '''_summary_ Args: trainsitions (tuple): _description_ ''' self.buffer.append(transitions) def sample(self, batch_size: int, sequential: bool = False): if batch_size > len(self.buffer): batch_size = len(self.buffer) if sequential: # sequential sampling rand = random.randint(0, len(self.buffer) - batch_size) batch = [self.buffer[i] for i in range(rand, rand + batch_size)] return zip(*batch) else: batch = random.sample(self.buffer, batch_size) return zip(*batch) def clear(self): self.buffer.clear() def __len__(self): return len(self.buffer)复制
from random import random import parl import paddle import math import numpy as np class DQNAgent(parl.Agent): """Agent of DQN. """ def __init__(self, algorithm, memory,cfg): super(DQNAgent, self).__init__(algorithm) self.n_actions = cfg['n_actions'] self.epsilon = cfg['epsilon_start'] self.sample_count = 0 self.epsilon_start = cfg['epsilon_start'] self.epsilon_end = cfg['epsilon_end'] self.epsilon_decay = cfg['epsilon_decay'] self.batch_size = cfg['batch_size'] self.global_step = 0 self.update_target_steps = 600 self.memory = memory # replay buffer def sample_action(self, state): self.sample_count += 1 # epsilon must decay(linear,exponential and etc.) for balancing exploration and exploitation self.epsilon = self.epsilon_end + (self.epsilon_start - self.epsilon_end) * \ math.exp(-1. * self.sample_count / self.epsilon_decay) if random.random() < self.epsilon: action = np.random.randint(self.n_actions) else: action = self.predict_action(state) return action def predict_action(self, state): state = paddle.to_tensor(state , dtype='float32') q_values = self.alg.predict(state) # self.alg 是自带的算法 action = q_values.argmax().numpy()[0] return action def update(self): """Update model with an episode data Args: obs(np.float32): shape of (batch_size, obs_dim) act(np.int32): shape of (batch_size) reward(np.float32): shape of (batch_size) next_obs(np.float32): shape of (batch_size, obs_dim) terminal(np.float32): shape of (batch_size) Returns: loss(float) """ if len(self.memory) < self.batch_size: # when transitions in memory donot meet a batch, not update return if self.global_step % self.update_target_steps == 0: self.alg.sync_target() self.global_step += 1 state_batch, action_batch, reward_batch, next_state_batch, done_batch = self.memory.sample( self.batch_size) action_batch = np.expand_dims(action_batch, axis=-1) reward_batch = np.expand_dims(reward_batch, axis=-1) done_batch = np.expand_dims(done_batch, axis=-1) state_batch = paddle.to_tensor(state_batch, dtype='float32') action_batch = paddle.to_tensor(action_batch, dtype='int32') reward_batch = paddle.to_tensor(reward_batch, dtype='float32') next_state_batch = paddle.to_tensor(next_state_batch, dtype='float32') done_batch = paddle.to_tensor(done_batch, dtype='float32') loss = self.alg.learn(state_batch, action_batch, reward_batch, next_state_batch, done_batch)复制
def train(cfg, env, agent): ''' 训练 ''' print(f"开始训练!") print(f"环境:{cfg['env_name']},算法:{cfg['algo_name']},设备:{cfg['device']}") rewards = [] # record rewards for all episodes steps = [] for i_ep in range(cfg["train_eps"]): ep_reward = 0 # reward per episode ep_step = 0 state = env.reset() # reset and obtain initial state for _ in range(cfg['ep_max_steps']): ep_step += 1 action = agent.sample_action(state) # sample action next_state, reward, done, _ = env.step(action) # update env and return transitions agent.memory.push((state, action, reward,next_state, done)) # save transitions state = next_state # update next state for env agent.update() # update agent ep_reward += reward # if done: break steps.append(ep_step) rewards.append(ep_reward) if (i_ep + 1) % 10 == 0: print(f"回合:{i_ep+1}/{cfg['train_eps']},奖励:{ep_reward:.2f},Epislon: {agent.epsilon:.3f}") print("完成训练!") env.close() res_dic = {'episodes':range(len(rewards)),'rewards':rewards,'steps':steps} return res_dic def test(cfg, env, agent): print("开始测试!") print(f"环境:{cfg['env_name']},算法:{cfg['algo_name']},设备:{cfg['device']}") rewards = [] # record rewards for all episodes steps = [] for i_ep in range(cfg['test_eps']): ep_reward = 0 # reward per episode ep_step = 0 state = env.reset() # reset and obtain initial state for _ in range(cfg['ep_max_steps']): ep_step+=1 action = agent.predict_action(state) # predict action next_state, reward, done, _ = env.step(action) state = next_state ep_reward += reward if done: break steps.append(ep_step) rewards.append(ep_reward) print(f"回合:{i_ep+1}/{cfg['test_eps']},奖励:{ep_reward:.2f}") print("完成测试!") env.close() return {'episodes':range(len(rewards)),'rewards':rewards,'steps':steps}复制
OpenAI Gym中其实集成了很多强化学习环境,足够大家学习了,但是在做强化学习的应用中免不了要自己创建环境,比如在本项目中其实不太好找到Qlearning能学出来的环境,Qlearning实在是太弱了,需要足够简单的环境才行,因此本项目写了一个环境,大家感兴趣的话可以看一下,一般环境接口最关键的部分即使reset和step。
import gym import paddle import numpy as np import random import os from parl.algorithms import DQN def all_seed(env,seed = 1): ''' omnipotent seed for RL, attention the position of seed function, you'd better put it just following the env create function Args: env (_type_): seed (int, optional): _description_. Defaults to 1. ''' print(f"seed = {seed}") env.seed(seed) # env config np.random.seed(seed) random.seed(seed) paddle.seed(seed) def env_agent_config(cfg): ''' create env and agent ''' env = gym.make(cfg['env_name']) if cfg['seed'] !=0: # set random seed all_seed(env,seed=cfg["seed"]) n_states = env.observation_space.shape[0] # print(hasattr(env.observation_space, 'n')) n_actions = env.action_space.n # action dimension print(f"n_states: {n_states}, n_actions: {n_actions}") cfg.update({"n_states":n_states,"n_actions":n_actions}) # update to cfg paramters model = MLP(n_states,n_actions) algo = DQN(model, gamma=cfg['gamma'], lr=cfg['lr']) memory = ReplayBuffer(cfg["memory_capacity"]) # replay buffer agent = DQNAgent(algo,memory,cfg) # create agent return env, agent复制
到这里所有qlearning模块就算完成了,下面需要设置一些参数,方便大家“炼丹”,其中默认的是笔者已经调好的~。另外为了定义了一个画图函数,用来描述奖励的变化。
import argparse import seaborn as sns import matplotlib.pyplot as plt def get_args(): """ """ parser = argparse.ArgumentParser(description="hyperparameters") parser.add_argument('--algo_name',default='DQN',type=str,help="name of algorithm") parser.add_argument('--env_name',default='CartPole-v0',type=str,help="name of environment") parser.add_argument('--train_eps',default=200,type=int,help="episodes of training") # 训练的回合数 parser.add_argument('--test_eps',default=20,type=int,help="episodes of testing") # 测试的回合数 parser.add_argument('--ep_max_steps',default = 100000,type=int,help="steps per episode, much larger value can simulate infinite steps") parser.add_argument('--gamma',default=0.99,type=float,help="discounted factor") # 折扣因子 parser.add_argument('--epsilon_start',default=0.95,type=float,help="initial value of epsilon") # e-greedy策略中初始epsilon parser.add_argument('--epsilon_end',default=0.01,type=float,help="final value of epsilon") # e-greedy策略中的终止epsilon parser.add_argument('--epsilon_decay',default=200,type=int,help="decay rate of epsilon") # e-greedy策略中epsilon的衰减率 parser.add_argument('--memory_capacity',default=200000,type=int) # replay memory的容量 parser.add_argument('--memory_warmup_size',default=200,type=int) # replay memory的预热容量 parser.add_argument('--batch_size',default=64,type=int,help="batch size of training") # 训练时每次使用的样本数 parser.add_argument('--targe_update_fre',default=200,type=int,help="frequency of target network update") # target network更新频率 parser.add_argument('--seed',default=10,type=int,help="seed") parser.add_argument('--lr',default=0.0001,type=float,help="learning rate") parser.add_argument('--device',default='cpu',type=str,help="cpu or gpu") args = parser.parse_args([]) args = {**vars(args)} # type(dict) return args def smooth(data, weight=0.9): '''用于平滑曲线,类似于Tensorboard中的smooth Args: data (List):输入数据 weight (Float): 平滑权重,处于0-1之间,数值越高说明越平滑,一般取0.9 Returns: smoothed (List): 平滑后的数据 ''' last = data[0] # First value in the plot (first timestep) smoothed = list() for point in data: smoothed_val = last * weight + (1 - weight) * point # 计算平滑值 smoothed.append(smoothed_val) last = smoothed_val return smoothed def plot_rewards(rewards,cfg,path=None,tag='train'): sns.set() plt.figure() # 创建一个图形实例,方便同时多画几个图 plt.title(f"{tag}ing curve on {cfg['device']} of {cfg['algo_name']} for {cfg['env_name']}") plt.xlabel('epsiodes') plt.plot(rewards, label='rewards') plt.plot(smooth(rewards), label='smoothed') plt.legend()复制
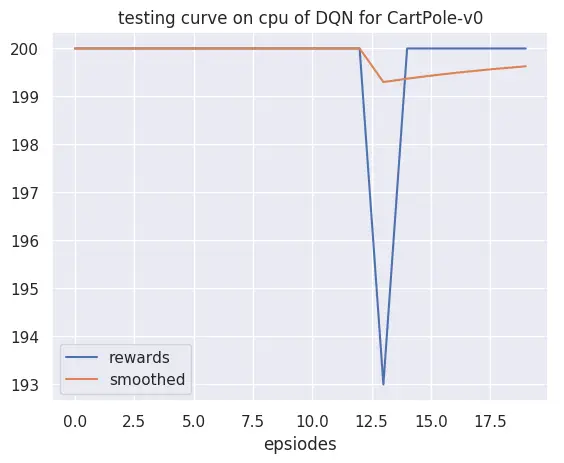
# 获取参数 cfg = get_args() # 训练 env, agent = env_agent_config(cfg) res_dic = train(cfg, env, agent) plot_rewards(res_dic['rewards'], cfg, tag="train") # 测试 res_dic = test(cfg, env, agent) plot_rewards(res_dic['rewards'], cfg, tag="test") # 画出结果复制
seed = 10 n_states: 4, n_actions: 2 开始训练! 环境:CartPole-v0,算法:DQN,设备:cpu 回合:10/200,奖励:10.00,Epislon: 0.062 回合:20/200,奖励:85.00,Epislon: 0.014 回合:30/200,奖励:41.00,Epislon: 0.011 回合:40/200,奖励:31.00,Epislon: 0.010 回合:50/200,奖励:22.00,Epislon: 0.010 回合:60/200,奖励:10.00,Epislon: 0.010 回合:70/200,奖励:10.00,Epislon: 0.010 回合:80/200,奖励:22.00,Epislon: 0.010 回合:90/200,奖励:30.00,Epislon: 0.010 回合:100/200,奖励:20.00,Epislon: 0.010 回合:110/200,奖励:15.00,Epislon: 0.010 回合:120/200,奖励:45.00,Epislon: 0.010 回合:130/200,奖励:73.00,Epislon: 0.010 回合:140/200,奖励:180.00,Epislon: 0.010 回合:150/200,奖励:167.00,Epislon: 0.010 回合:160/200,奖励:200.00,Epislon: 0.010 回合:170/200,奖励:165.00,Epislon: 0.010 回合:180/200,奖励:200.00,Epislon: 0.010 回合:190/200,奖励:200.00,Epislon: 0.010复制

以上是Spring WebFlux 框架核心组件的全部介绍了,希望可以帮助你全面深入的理解 WebFlux的原理,关注【威哥爱编程】,主页里可查看V哥每天更新的原创技术内容,让我们一起成长。
GE(Graph Engine)图引擎采用多流并行算法,在满足计算图任务内部依赖关系的前提下,支持高效并发执行计算任务,从而大大提高硬件资源利用率和AI计算效率。