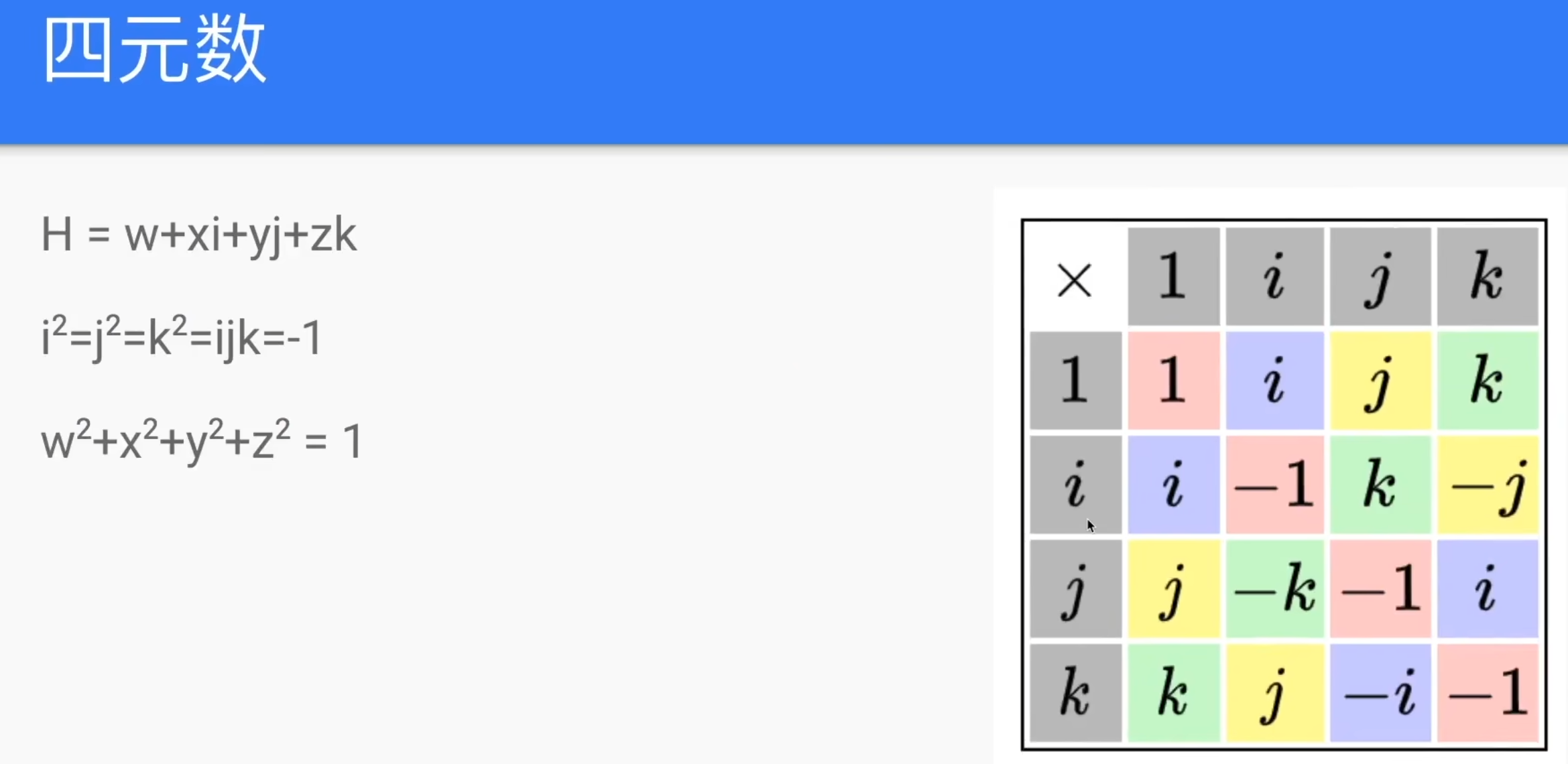
四元数是一种用于表示旋转和方向的数学对象,它由一个实部和三个虚部组成。四元数可以用来替代旋转矩阵,在计算机图形学、机器人学、物理学等领域有广泛的应用。
四元数的一般形式为:q = a + bi + cj + dk,其中a,b,c,d为实数,i,j,k为虚数单位,满足i2=j2=k^2=ijk=-1。四元数的实部a表示旋转的余弦值,虚部bi+cj+dk表示旋转的轴向及其角度。
四元数法是一种使用四元数进行运动学计算的方法,包括旋转、位移、缩放等变换。与欧拉角相比,四元数法有更好的数值稳定性和计算效率,避免了万向锁问题。在3D游戏和动画领域,四元数法也是常用的动画插值方法之一,可以实现流畅的动画效果。
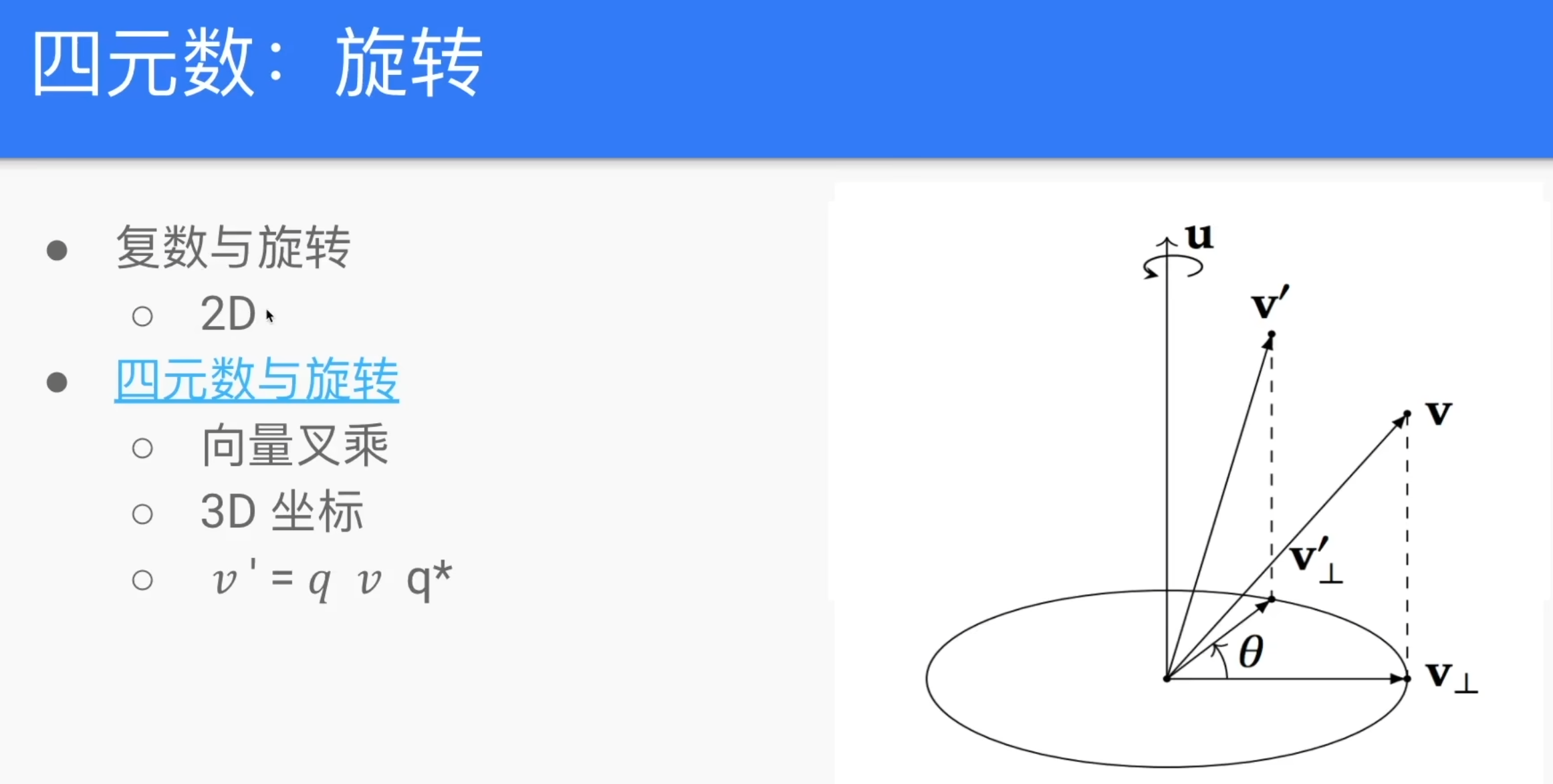
假设有一个物体在三维空间中,需要将其绕着一个轴旋转一定的角度,可以使用四元数来表示这个旋转变换。首先需要构造表示旋转的四元数:
首先需要确定旋转的轴向,可以将轴向向量归一化,得到单位向量 u = [ux, uy, uz]。
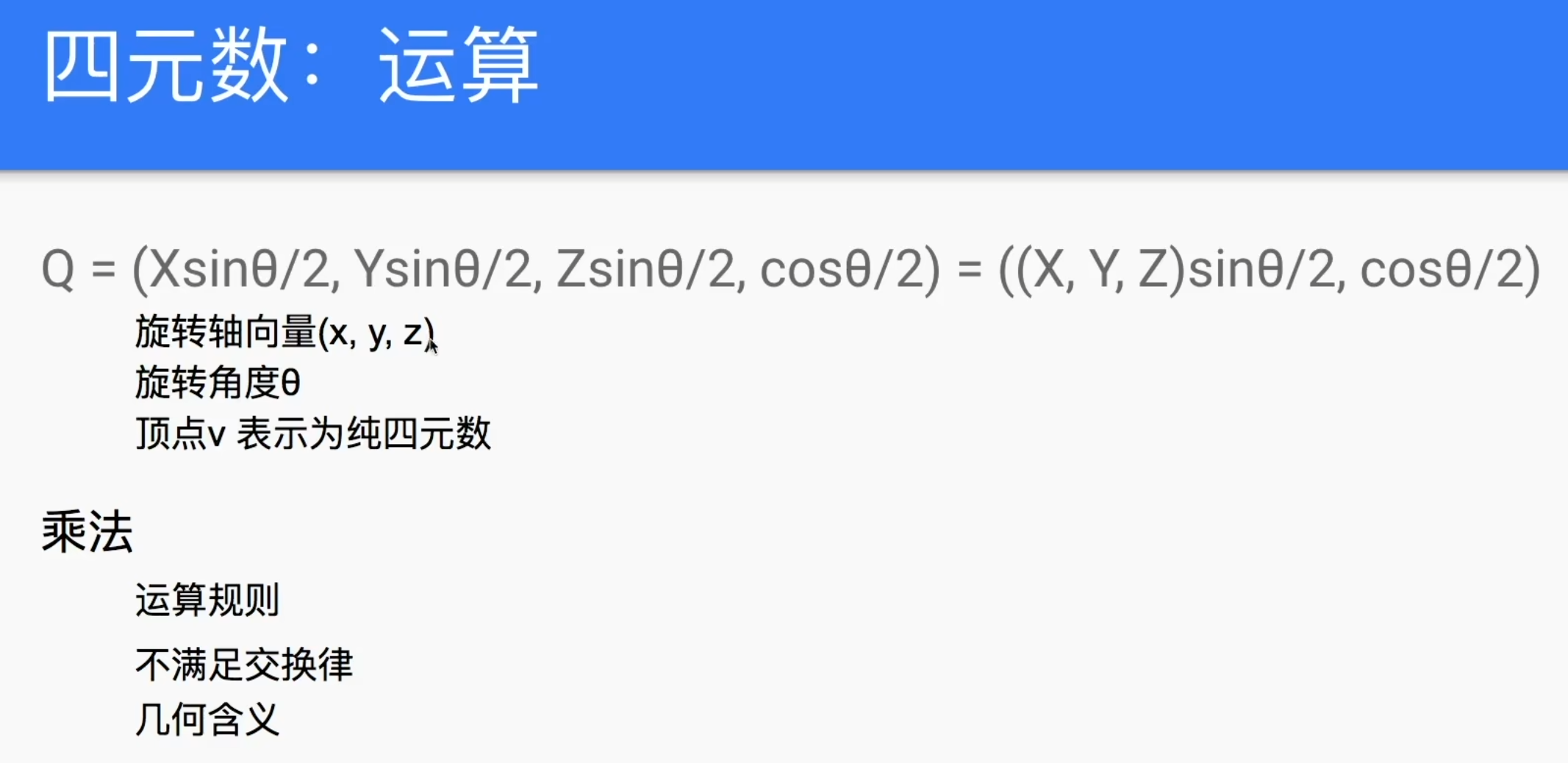
根据旋转角度 theta,计算旋转的复数部分 c = cos(theta/2),以及旋转的虚数部分 s = sin(theta/2)。
构造四元数 q = c + su = [c, sux, suy, s*uz]。
通过构造的四元数 q,可以对物体进行旋转变换,具体地,对于三维空间中的一个点 p = [px, py, pz],可以进行如下变换:
构造点 p 的四元数 p0 = [0, px, py, pz],即将点 p 表示成四元数的形式,实部为 0。
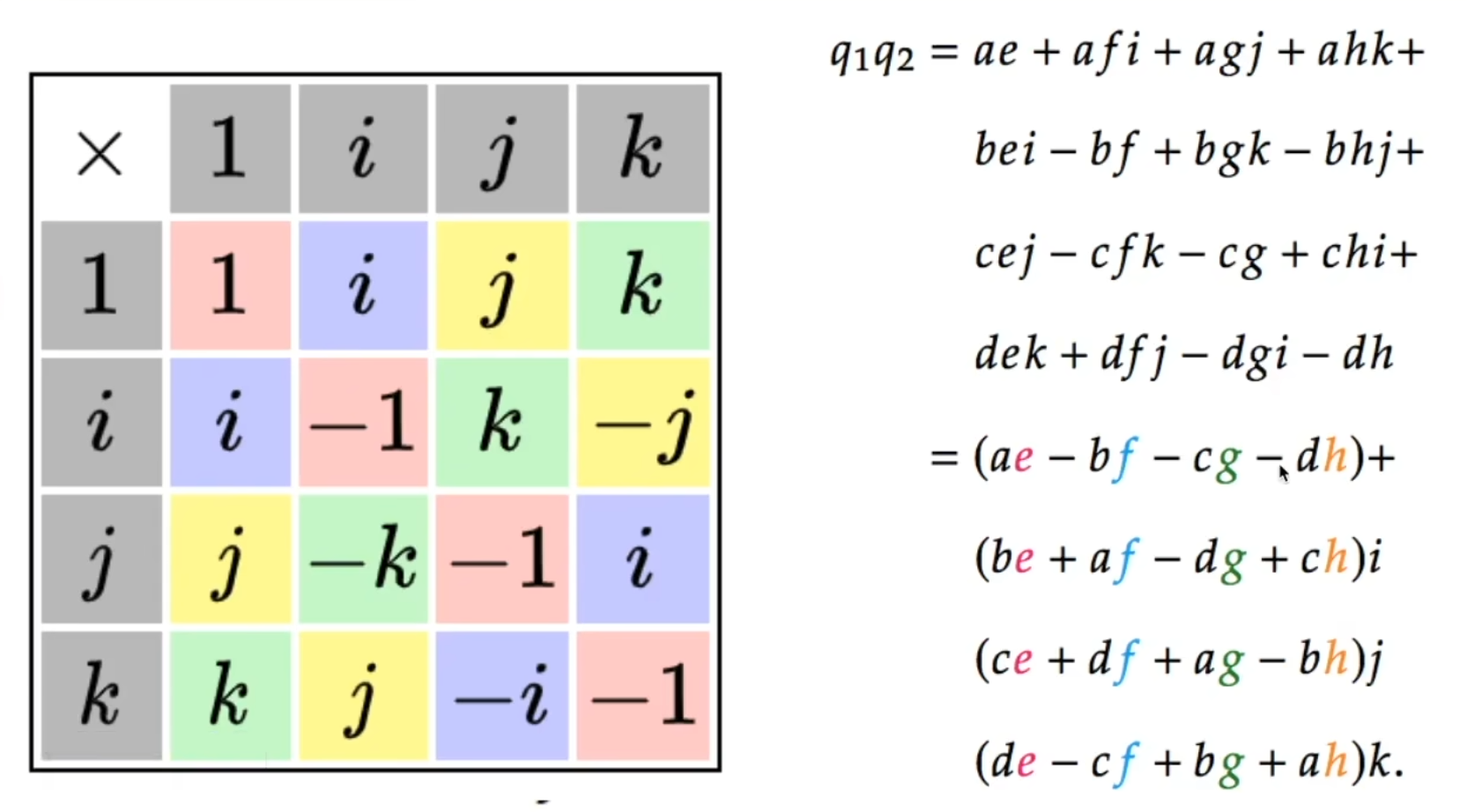
计算旋转后的四元数 p1 = qp0q,其中 q 表示 q 的共轭四元数,即 q 的实部不变,虚部取相反数。
将旋转后的四元数 p1 表示成点的形式,即 p' = [p1x, p1y, p1z],其中 p1x, p1y, p1z 分别对应 p1 的三个虚数部分。
这样就完成了对点 p 的旋转变换。可以使用四元数法进行多个旋转的叠加,也可以使用四元数法进行插值,实现平滑的动画效果。