基于SLAM系统完成建图仿真,详见之前的博客
参考链接
sudo apt install ros-melodic-navigation复制
roscd amcl gedit examples/amcl_diff.launch复制


mycar_ws/src/nav_demo/launch/nav04_amcl.launch
<launch> <node pkg="amcl" type="amcl" name="amcl" output="screen"> <!-- Publish scans from best pose at a max of 10 Hz --> <param name="odom_model_type" value="diff"/> <param name="odom_alpha5" value="0.1"/> <param name="transform_tolerance" value="0.2" /> <param name="gui_publish_rate" value="10.0"/> <param name="laser_max_beams" value="30"/> <param name="min_particles" value="500"/> <param name="max_particles" value="5000"/> <param name="kld_err" value="0.05"/> <param name="kld_z" value="0.99"/> <param name="odom_alpha1" value="0.2"/> <param name="odom_alpha2" value="0.2"/> <!-- translation std dev, m --> <param name="odom_alpha3" value="0.8"/> <param name="odom_alpha4" value="0.2"/> <param name="laser_z_hit" value="0.5"/> <param name="laser_z_short" value="0.05"/> <param name="laser_z_max" value="0.05"/> <param name="laser_z_rand" value="0.5"/> <param name="laser_sigma_hit" value="0.2"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_model_type" value="likelihood_field"/> <!-- <param name="laser_model_type" value="beam"/> --> <param name="laser_likelihood_max_dist" value="2.0"/> <param name="update_min_d" value="0.2"/> <param name="update_min_a" value="0.5"/> <!-- set coordinate system: odom、map、base_link --> <param name="odom_frame_id" value="odom"/> <param name="base_frame_id" value="base_footprint"/> <param name="resample_interval" value="1"/> <param name="transform_tolerance" value="0.1"/> <param name="recovery_alpha_slow" value="0.0"/> <param name="recovery_alpha_fast" value="0.0"/> </node> </launch>复制
mycar_ws/src/nav_demo/launch/test_amcl.launch
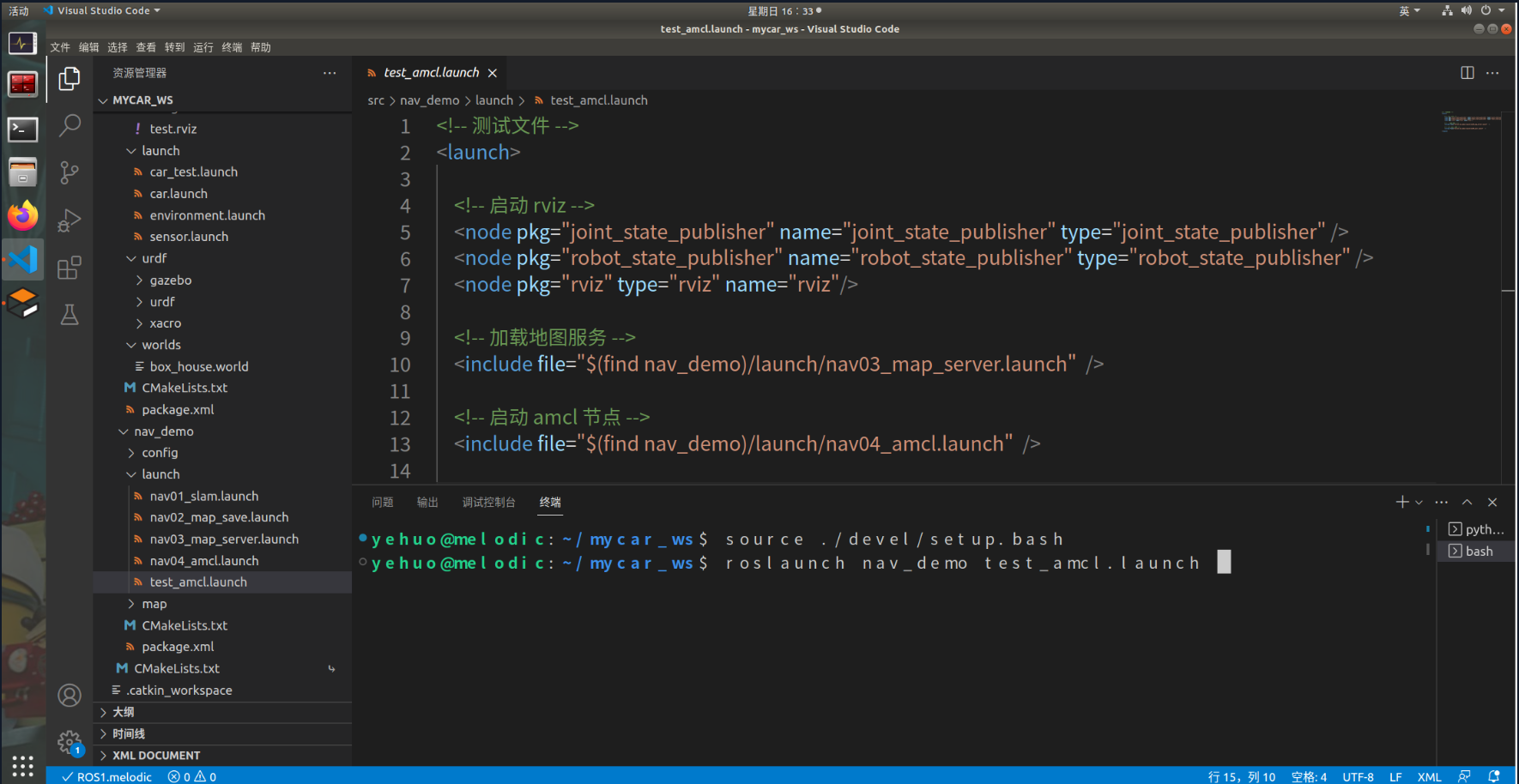
<!-- 测试文件 --> <launch> <!-- 启动 rviz --> <node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /> <node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /> <node pkg="rviz" type="rviz" name="rviz"/> <!-- 加载地图服务 --> <include file="$(find nav_demo)/launch/nav03_map_server.launch" /> <!-- 启动 amcl 节点 --> <include file="$(find nav_demo)/launch/nav04_amcl.launch" /> </launch>复制
source ./devel/setup.bash
roslaunch mycar environment.launch
复制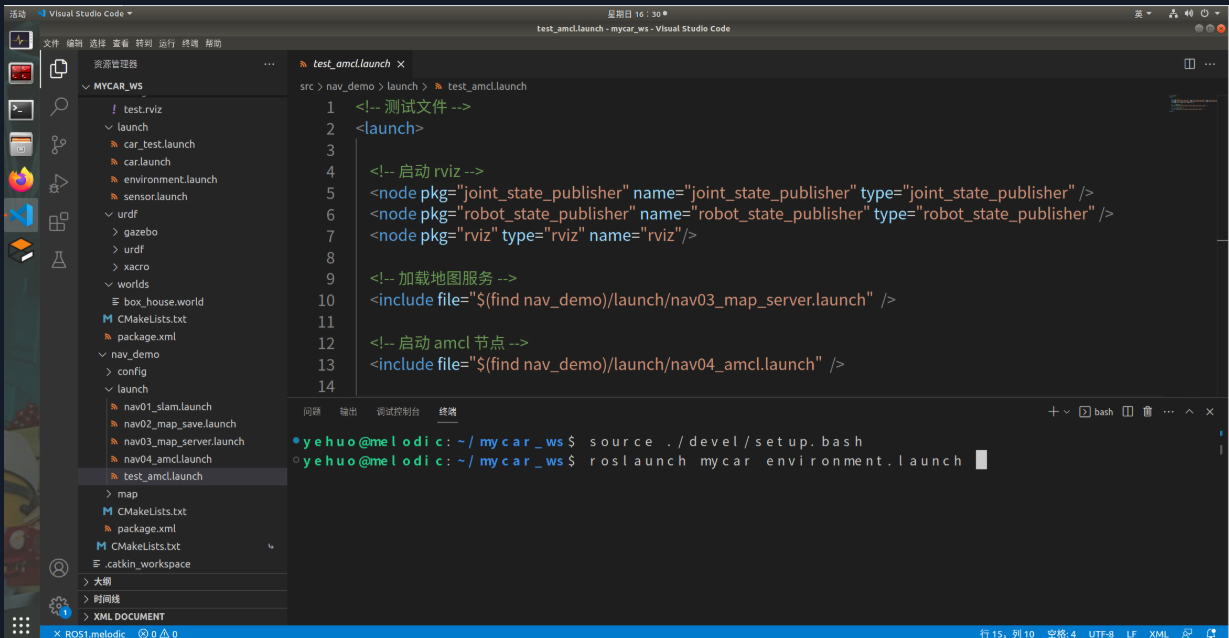
source ./devel/setup.bash
roslaunch nav_demo test_amcl.launch
复制

rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5复制




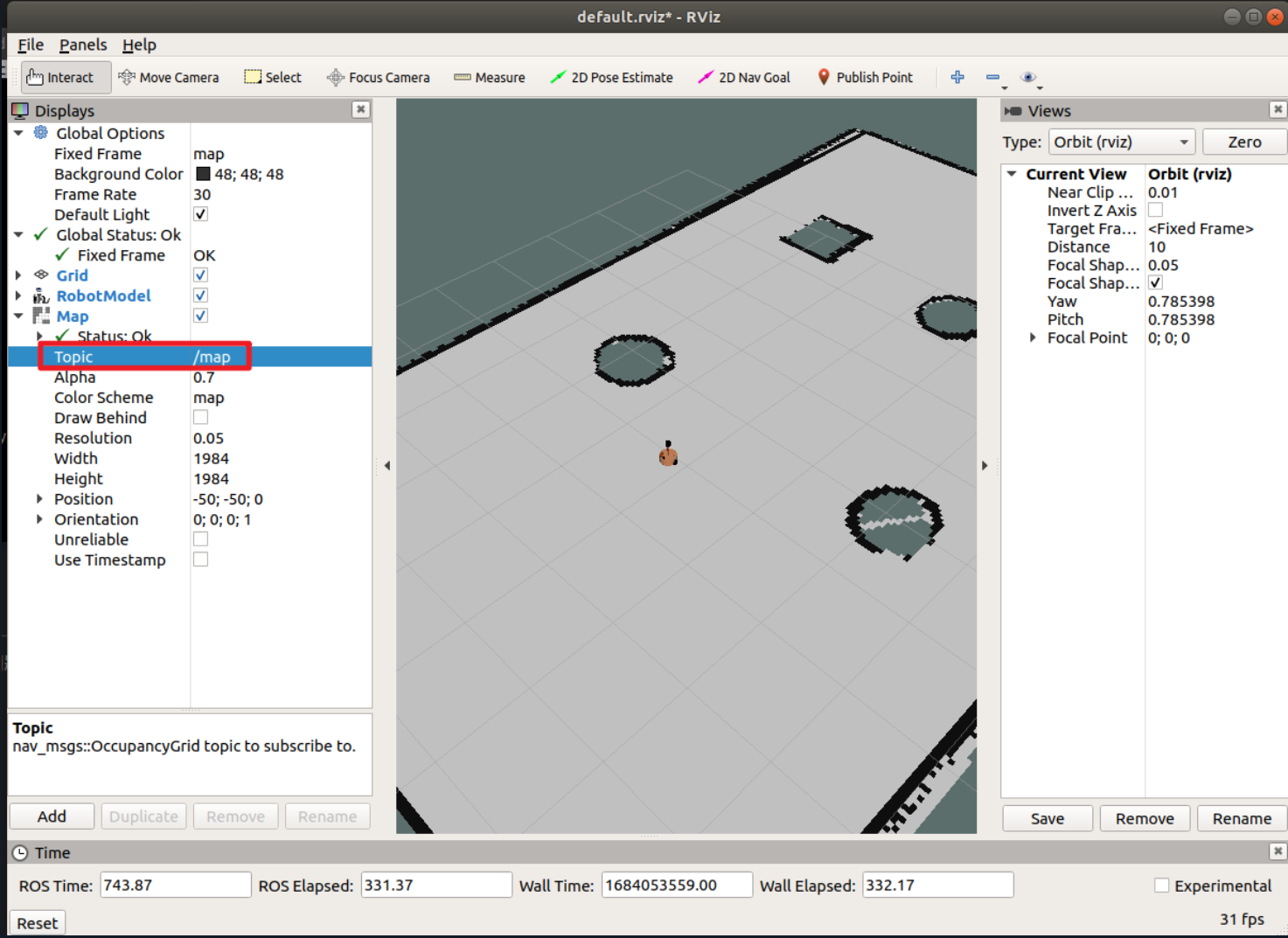
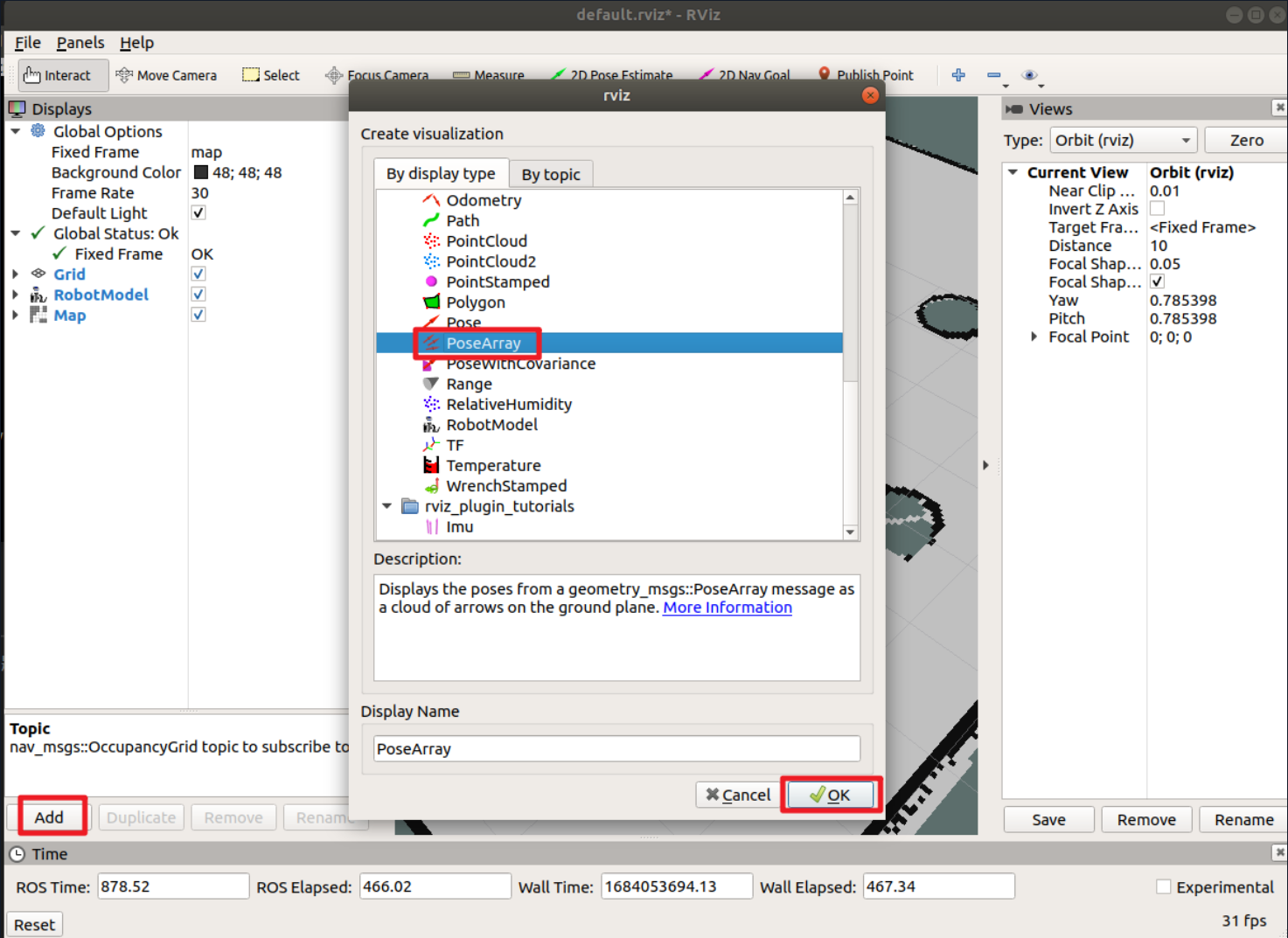
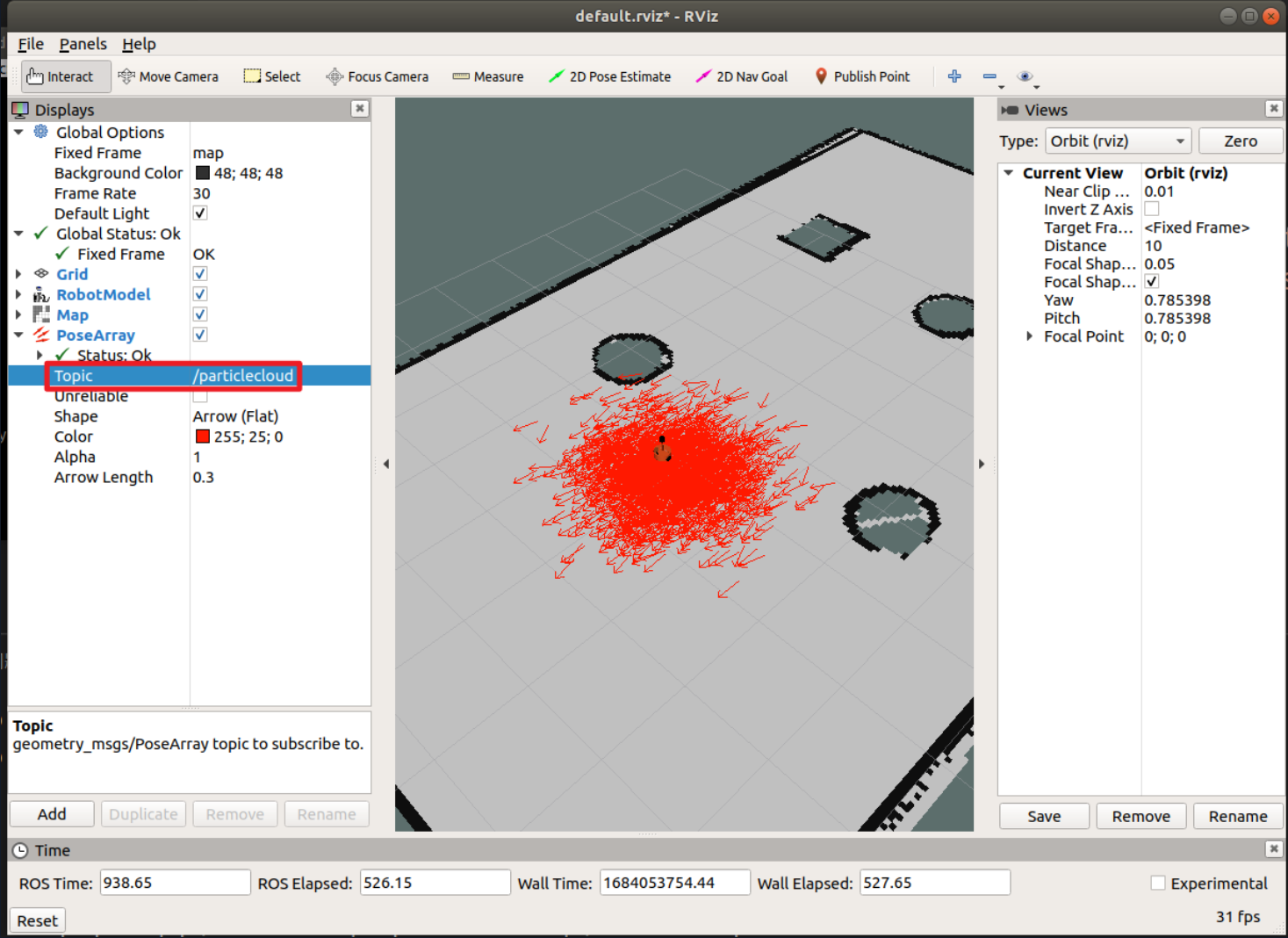
调整至以下三个窗口均能观察到的布局,便于观看现象
通过键盘即可操控机器人运动
