基于[移动机器人运动规划及运动仿真],详见之前的博客
参考链接
ubuntu 18.04
<launch> <!-- 仿真环境下,将该参数设置为true --> <param name="use_sim_time" value="true"/> <!-- gmapping --> <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"> <!-- 设置雷达话题 --> <remap from="scan" to="scan"/> <!-- 关键参数:坐标系 --> <param name="base_frame" value="base_footprint"/><!--底盘坐标系--> <param name="map_frame" value="map"/> <param name="odom_frame" value="odom"/> <!--里程计坐标系--> <param name="map_update_interval" value="5.0"/> <param name="maxUrange" value="16.0"/> <param name="sigma" value="0.05"/> <param name="kernelSize" value="1"/> <param name="lstep" value="0.05"/> <param name="astep" value="0.05"/> <param name="iterations" value="5"/> <param name="lsigma" value="0.075"/> <param name="ogain" value="3.0"/> <param name="lskip" value="0"/> <param name="srr" value="0.1"/> <param name="srt" value="0.2"/> <param name="str" value="0.1"/> <param name="stt" value="0.2"/> <param name="linearUpdate" value="1.0"/> <param name="angularUpdate" value="0.5"/> <param name="temporalUpdate" value="3.0"/> <param name="resampleThreshold" value="0.5"/> <param name="particles" value="30"/> <param name="xmin" value="-50.0"/> <param name="ymin" value="-50.0"/> <param name="xmax" value="50.0"/> <param name="ymax" value="50.0"/> <param name="delta" value="0.05"/> <param name="llsamplerange" value="0.01"/> <param name="llsamplestep" value="0.01"/> <param name="lasamplerange" value="0.005"/> <param name="lasamplestep" value="0.005"/> </node> <node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /> <node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_demo)/config/nav_test.rviz"/> </launch>复制
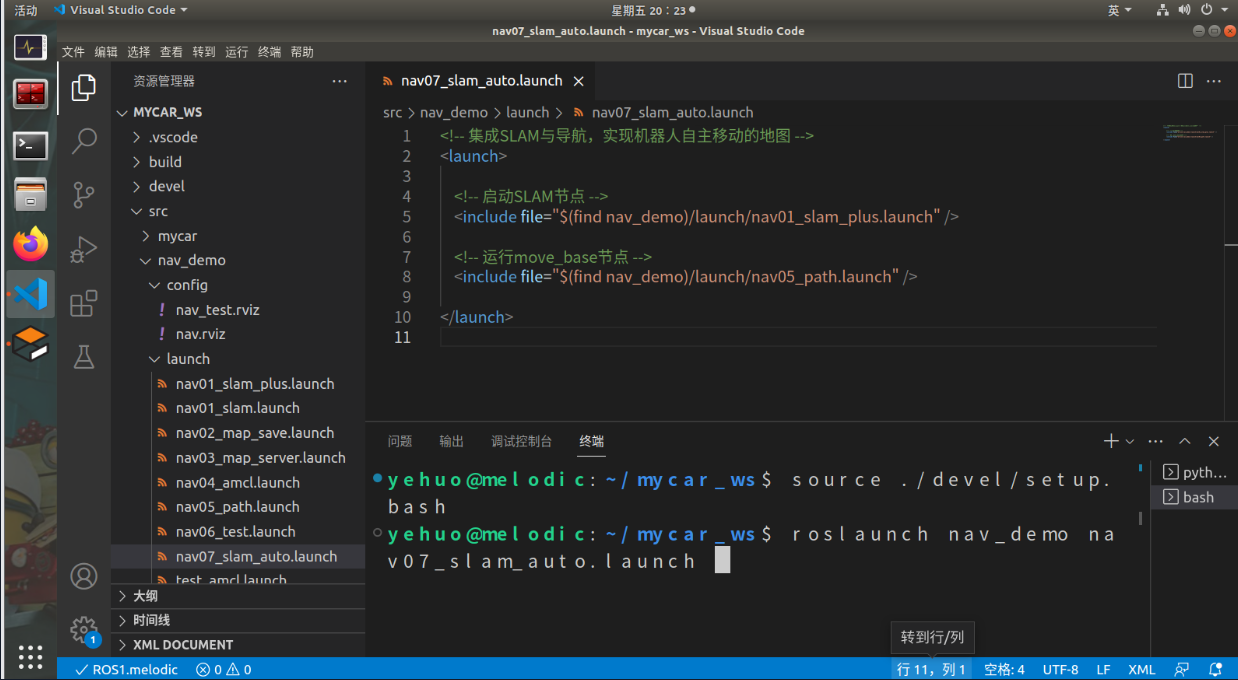
<!-- 集成SLAM与导航,实现机器人自主移动的地图 --> <launch> <!-- 启动SLAM节点 --> <include file="$(find nav_demo)/launch/nav01_slam_plus.launch" /> <!-- 运行move_base节点 --> <include file="$(find nav_demo)/launch/nav05_path.launch" /> </launch>复制
source ./devel/setup.bash
roslaunch mycar environment.launch
复制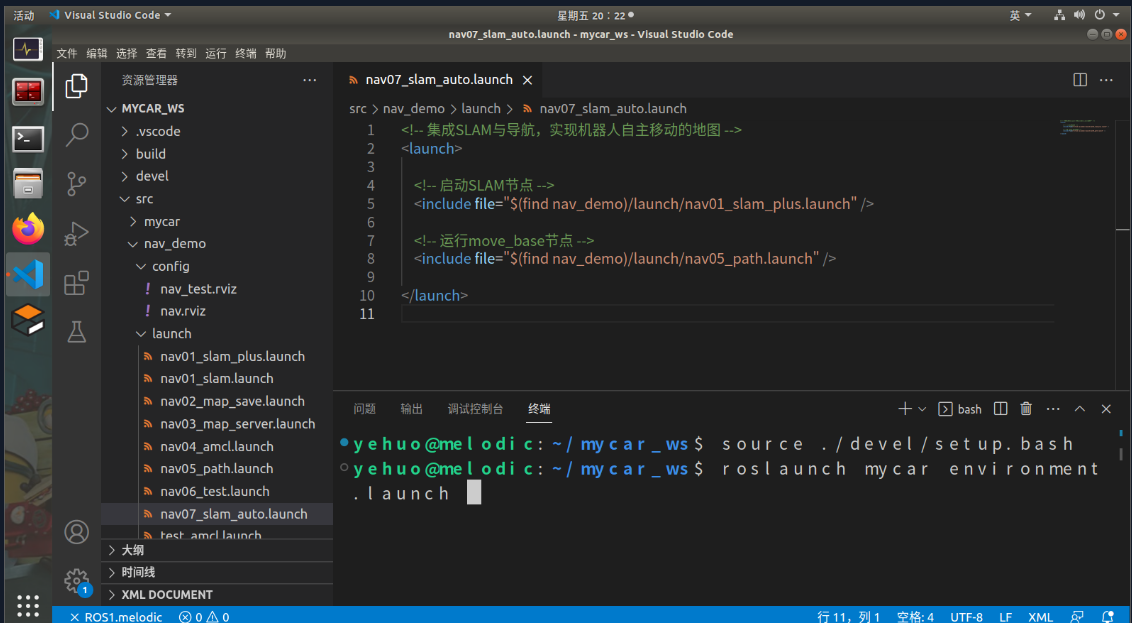
source ./devel/setup.bash
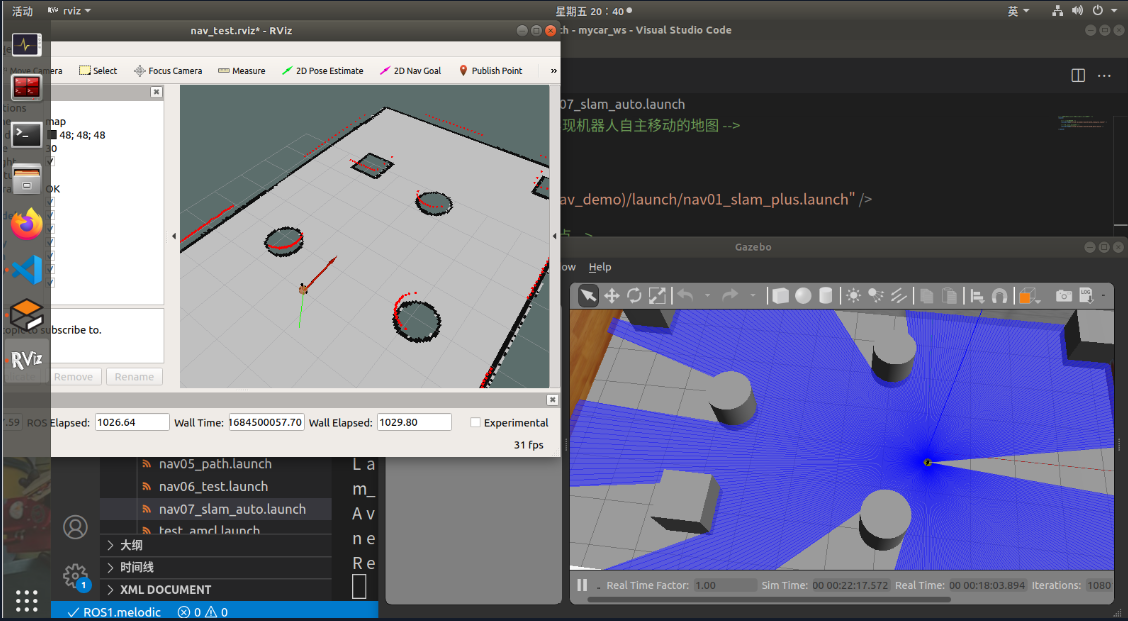
roslaunch nav_demo nav07_slam_auto.launch
复制