本文已收录到 AndroidFamily,技术和职场问题,请关注公众号 [彭旭锐] 提问。
大家好,我是小彭。
在前几篇文章里,我们聊到了 Java 中的几种线性表结构,包括 ArrayList、LinkedList、ArrayDeque 等。今天,我们来讨论另一种常用的基础数据结构,同时也是 “面试八股文” 的标准题库之一 —— 散列表(Hash Table)。
同时,在后续的文章里,我们将以 Java 语言为例,分析标准库中实现的散列表实现,包括 HashMap、ThreadLocalMap、LinkedHashMap 和 ConcurrentHashMap。请关注。
小彭的 Android 交流群 02 群已经建立啦,扫描文末二维码进入~
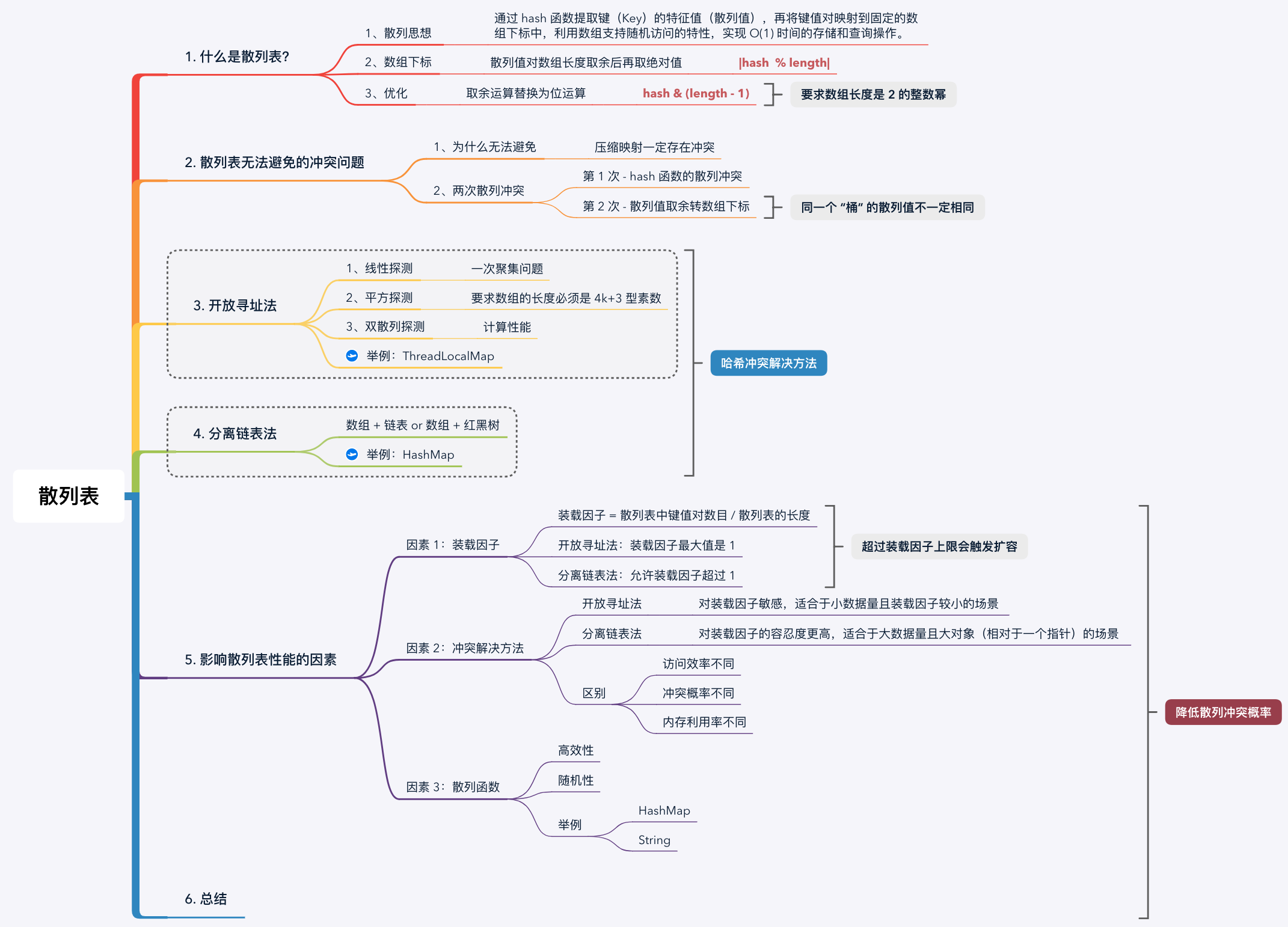
思维导图:
散列表是基于散列思想实现的 Map 数据结构,散列思想是散列表的核心特性,也就做哈希算法或 Hash 算法。散列算法是一种将 “任意长度的输入数据” 映射为 “固定长度的特征值” 的算法,输出的特征值就是散列值。
用一个表格总结散列算法的主要性质:
| 性质 | 描述 |
|---|---|
| 1、单向性(基本性质) | 支持从输入生成散列值,不支持从散列值反推输入 |
| 2、高效性(基本性质) | 单次散列运算计算量低 |
| 3、一致性(基本性质) | 相同输入重复计算,总是得到相同散列值 |
| 4、随机性(高效性质) | 散列值在输出值域的分布尽量随机 |
| 5、输入敏感性(高效性质) | 相似的数据,计算后的散列值差别很大 |
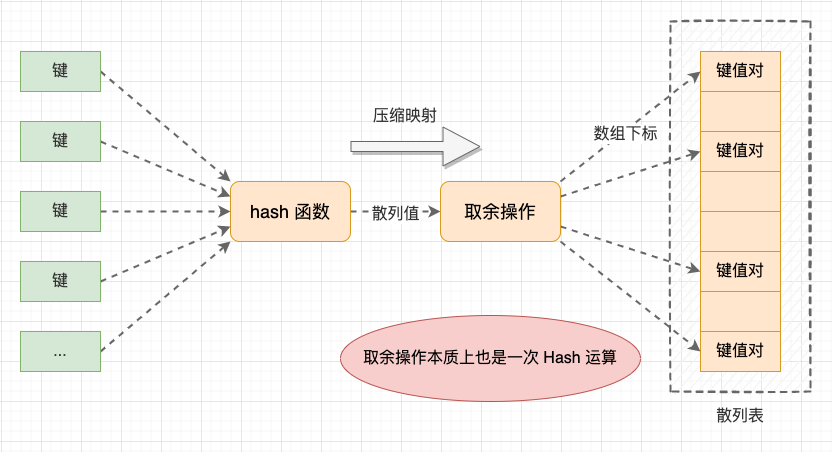
将散列思想应用到散列表数据结构上时,就是通过 hash 函数提取键(Key)的特征值(散列值),再将键值对映射到固定的数组下标中,利用数组支持随机访问的特性,实现 O(1) 时间的存储和查询操作。
事实上,一般不会直接使用 hash 函数计算后的散列值作为数组下标。例如 Java Object#hashCode() 散列值是 int 类型,值域足足有 2^32 的容量,我们不可能创建这么大的数组。
最简单的做法是将散列值对数组长度取余后再取绝对值:|hash % length|。如果数组长度 length 是 2 的整数幂,还可以等价替换成位运算:hash & (length - 1) ,不管被除数是正负结果都是正数。 不仅将取余运算替换为位运算,而且减少了一次取绝对值运算,提高了索引的计算效率。
10 % 4 = 2
-10 % 4 = -2 // 负数
10 & (4 - 1) = 2
-10 & (4 - 1) = 2 // 正数
复制散列表示意图
提示: 虽然我们将取余运算优化为位运算,但是为了便于理解,我们在后文中依然描述为逻辑上的 “取余” 运算。
因为 Hash 算法会将非常大甚至无穷大的输入值域映射到 “固定长度的特征值”,所以 Hash 算法一定是压缩映射。例如,MD5 的输出散列值为 128 位,SHA256 的输出散列值为 256 位,这就存在 2 个不同的输入产生相同输出的可能性。这就是散列冲突或哈希冲突(Hash Collision)问题。
事实上,在散列表的设计中存在 2 次散列冲突:
第 1 次 - hash 函数的散列冲突: 这是一般意义上的散列冲突;
第 2 次 - 散列值取余转数组下标: 本质上,将散列值转数组下标也是一次 Hash 算法,也会存在散列冲突。同时,这也说明 HashMap 中同一个桶中节点的散列值不一定是相同的。
其实,散列冲突只要用鸽巢原理(又称:抽屉原理)就很好理解了,假设有 10 个鸽巢,现有 11 只鸽子,无论分配多么平均,也肯定有一个鸽巢里有两只甚至多只鸽子。举一个直接的例子,Java 中的字符串 "Aa" 与 "BB" 的就存在散列冲突。
散列冲突举例
String str1 = "Aa";
String str2 = "BB";
System.out.println(str1.hashCode()); // 2112
System.out.println(str2.hashCode()); // 2112 散列冲突
复制由于我们无法避免散列冲突,所以只能保证散列表不会因为散列冲突而失去正确性。常用的散列冲突解决方法有 2 类:
开放寻址(Open Addressing)的核心思想是: 在出现散列冲突时,在数组上重新探测出一个空闲位置。 经典的探测方法有线性探测(Linear Probing)、平方探测(Quadratic Probing)和双散列探测(Double Hashing Probing)。
线性探测是最基本的探测方法,在 Java 实现线程局部存储的 ThreadLocal 类中的散列表,就是基于线性探测的散列表。ThreadLocal 我们会在后续专栏文章会讨论,请关注。
添加键值对: 先将散列值取余映射到数组下标,然后从数组下标位置开始探测与目标 Key 相等的节点。如果找到,则将旧 Value 替换为新 Value,否则沿着数组顺序线性探测。直到线性探测遇到空闲位置,则说明节点不存在,需要添加新节点。如果在添加键值对后数组没有空闲位置,就触发扩容;
查找键值对: 查找类似。也是先将散列值映射到数组下标,然后从数组下标位置开始线性探测。直到线性探测遇到空闲位置,则说明节点不存在;
删除键值对: 删除类似。由于查找操作在遇到空闲位置时,会认为键值对不存在于散列表中,如果删除操作时 “真删除”,就会使得一组连续段产生断层,导致查找操作失效。因此,删除操作要做 “假删除”,删除操作只是将节点标记为 “Deleted”,查找操作在遇到 “Deleted” 标记的节点时会继续向下探测。
开放寻址法示意图
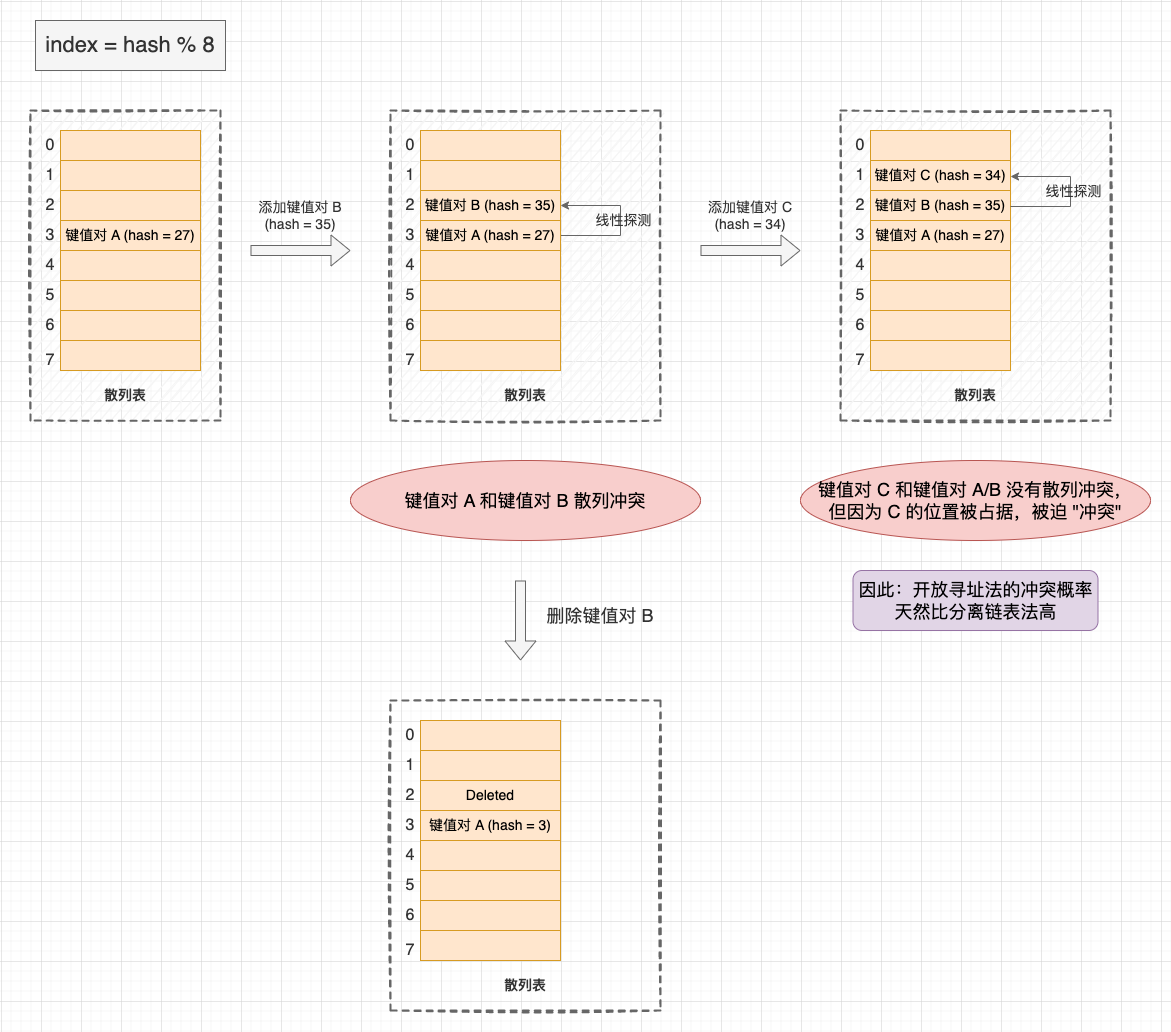
线性探测的缺点是 “一次聚集” 问题: 不仅会让散列冲突的键值对聚集,还会让原本没有散列冲突但位置被占用的节点被迫聚集在一起,降低了添加和查找效率。最坏情况下,有可能需要线性探测整张散列表才能找到目标位置。
平方探测与线性探测类似,区别在于: 线性探测的探测指针是一个线性序列,而平方探测的探测指针是一个平方序列。使用平方探测并不能完全解决 “聚集” 问题,但相比于线性探测聚集现象有所减弱。
需要特别注意, 平方探测法必须要求数组的长度必须是 4k+3 型素数, 才能保证能够探测完整个数组空间,否则会出现数组有空闲位置,但平方探测找不到的情况,此时扩容显得没有必要。
双散列探测的核心思想是: 提供一组散列函数,在遇到计算得到的数组下标位置被占用,则使用下一个散列函数重新计算,直到找到空闲位置。
对比下 3 种方法的探测步骤:
线性探测: hash(key) + 0,hash(key) + 1,hash(key) + 2,hash(key) + 3…
平方探测: hash(key) + 0^2,hash(key) + 1^2,hash(key) + 2^2,hash(key) + 3^2…
双散列探测: hash(key),hash1(key),hash2(key),hash3(key)…
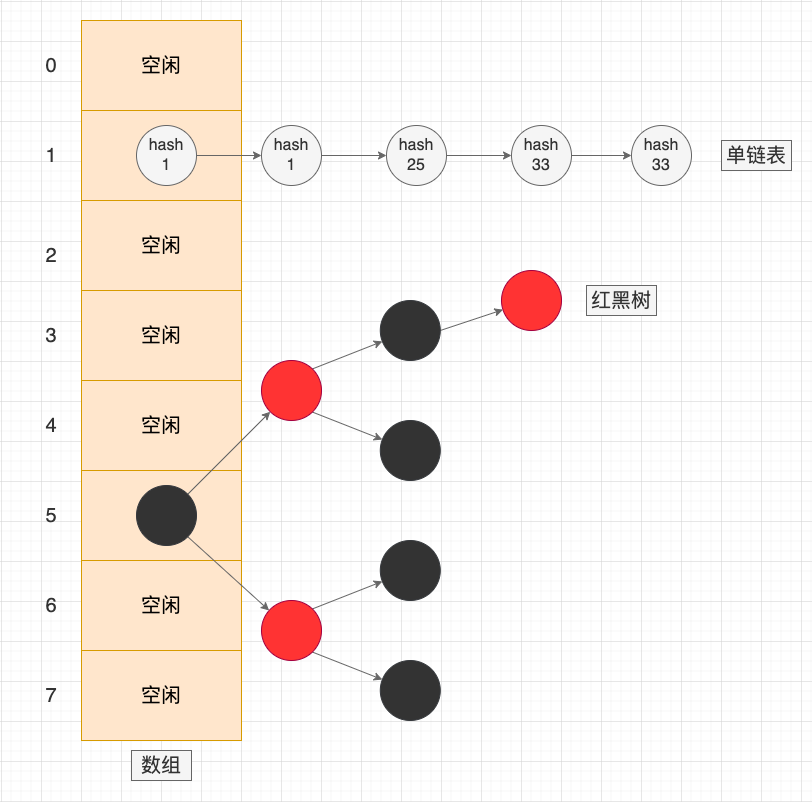
分离链表法(Separate Chaining)的核心思想是: 在出现散列冲突时,将冲突的元素添加到同一个桶(Bucket / Slot)中,桶中的元素会组成一个链表,或者跳表、红黑树等动态数据结构。
相较之下,链表法是更常用且更稳定的冲突解决方法,我们熟悉的 Java HashMap 就是基于分离链表法的实现。HashMap 我们会在后续专栏文章会讨论,请关注。
添加键值对: 先通过散列函数将散列值映射到数组下标,然后沿着链表寻找节点的 Key 和添加的 key 相等的节点。如果找到,则将旧 Value 替换为新 Value,如果找不到,则创建在链表上新建节点;
查找键值对: 查找与添加的步骤类似,也是先将散列值映射到数组下标,然后沿着链表寻找节点的 Key 和添加的 key 相等的节点。如果找不到,则说明键值对不存在于散列表中;
删除键值对: 删除键值对不需要 “假删除”,与添加和查找类似,也是先将散列值映射到数组下标,然后沿着链表寻找节点的 Key 和添加的 key 相等的节点。如果找到,则将节点从链表上移除。
分离链表法示意图
从上面的内容我们逐渐明白, 散列表操作的时间复杂度并不是绝对的 O(1)。 它与地址堆积的个数 K 或链表的长度 K 有关,也就是 O(K)。虽然 O(K) 也是常数时间复杂度,但并不是固定的常数。在极端情况下,当所有的数据都堆积在一起,或者所有数据都映射到相同的链表中时,时间复杂度就会从 O(1) 退化到 O(n)。
换句话说,影响散列表性能的关键在于 “散列冲突的发生概率”,冲突概率越低,时间复杂度越接近于 O(1)。 那么,哪些因素会影响冲突概率呢?主要有 3 个:装载因子、冲突解决方法、散列函数。
理解了开放地址法和分离链表法两种冲突解决方法后,我们会发现: 无论使用哪种方法,随着散列表中元素越来越多,空闲位置越来越少,就会导致散列冲突的发生概率越来越大,使得散列表操作的平均时间会越来越大。为了描述散列表的装满程度,我们定义 装载因子 (Load Factor) = 散列表中键值对数目 / 散列表的长度。
在基于开放寻址法的散列表中: 装载因子的最大值是 1(数组装满),装载因子为 1 时无法添加新元素,必须扩容;
在基于分离链表法的散列表中: 允许装载因子超过 1(拉长出很长的链表),装载因子为 1 时,扩容并不是必须的。
装载因子 = 散列表中键值对数目 / 散列表的长度复制
扩容本质上是扩大了散列算法的输出值域,扩大输出值域可以直接降低冲突概率。事实上,一般不会等到装载因子接近 1 时再扩容,而是设置一个处于 (0, 1) 之间的 装载因子上限(扩容阈值)。 例如,在 HashMap 中设置的默认装载因子上限是 0.75。
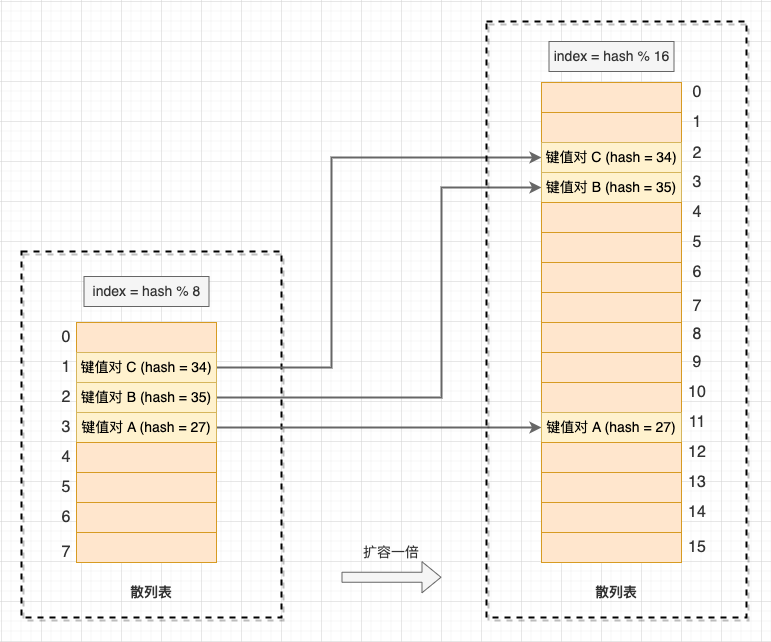
当散列表的装载因子大于扩容阈值时,就会触发扩容操作,并将原有的数据搬运到新的数组上。与普通数组相比,散列表的动态扩容不再是简单的数据搬运,因为数组的长度变化了,公式 hash & (length - 1) 的计算的下标位置也变了,所以这一扩容过程也叫 “再散列”(不要和双散列探测混淆)。
散列表的扩容过程
当添加操作触发扩容时,需要花费 O(n) 时间再散列和搬运数据,那么散列表的时间复杂度还是 O(1) 常数时间吗?对于这种大部分操作时间复杂度很低,只有个别情况下时间复杂度会退化,而且这些操作之间存在很强烈的顺序关系的情况,就很适合用 “均摊时间复杂度分析” 了。我们将花费 O(n) 时间的那一次插入操作的时间均摊到随后的多次 O(1) 时间插入操作上,那我们从整体看,添加数据的均摊时间复杂度就是 O(1)。
以上是从算法分析的角度,从工程分析的角度看,事情还没这么简单。 在大数据场景下,如果旧散列表中有 1 GB 数据,那么扩容操作就是对 1 GB 的数据量做再散列。无论算法分析把时间复杂度摊还到多低,对 1 GB 数据量的再散列就是实打实的耗时操作,也是无法忍受的。此时,为避免一次性扩容过多数据的情况,有一种 “懒扩容” 方案:在创新一个新散列表的同时,保留旧的散列表。每次插入新的数据都插入到新散列表中,并从旧散列表中取一个数据再散列到新的散列表中。经过多次操作后,旧散列表中的数据就逐渐搬运到新散列表中。
开放寻址法和分离链表法的优缺点和适用场景不同:
1、访问效率不同: 开放寻址法中数据都存储在数组中,是一个连续的内存区域,基于局部性原理,开放寻址法能够更好地命中 CPU 缓存行。而分离链表法中的数据主要位于链表中,是离散的内存区域,对 CPU 缓存行不优友好;
2、冲突概率不同: 开放寻址法的冲突概率天然比分离链表法高,这是因为开放寻址法在发生冲突后,会在临近的位置寻找空闲位置填充数据,这使得原本并没有 “冲突” 的键值对也会因为没有空闲位置而被迫堆积。而分离链表法只有确实发生冲突的键值对才会堆积到同一个桶中;
3、内存利用率不同: 由于开放寻址法的冲突概率更高,所以装载因子上限不能设置很高,存储相同的数据量,开放寻址法也需要预先申请更大的数组空间,内存利用率不会高。当然,分离链表法在链表指针上也有额外内存消耗,如果存储的元素的内存量远远大于一个指针的内存量,则可以忽略不及。
综上所述,它们各自的适用场景是什么呢?
开放寻址法 - 对装载因子敏感,适合于小数据量且装载因子较小的场景: 例如 Java 的 ThreadlLocalMap,因为项目中不会大量使用 ThreadLocal 线程局部存储,所以它是一个小规模数据场景,这里使用开发地址法是没问题的;
分离链表法 - 对装载因子的容忍度更高,适合于大数据量且大对象(相对于一个指针)的场景: 例如,Java 中更通用的 HashMap 散列表就是采用分离链表法。而且,分离链表法还能够使用更多灵活的优化策略,例如将链表树化为红黑树,避免极端情况下时间复杂度退化为 O(n)。
散列算法随机性和高效性也会影响散列表的性能。如果散列值不够随机,即使散列表整体的装载因子不高,也会使得数据聚集在某一个区域或桶内,依然会影响散列表的性能。如果散列算法不够高效,也会直接消耗计算性能。
1、散列表是基于散列思想实现的 Map 数据结构,就是通过 hash 函数提取键(Key)的特征值(散列值),再将键值对映射到固定的数组下标中,利用数组支持随机访问的特性,实现 O(1) 时间的存储和查询操作;
2、当数组的长度为 2 的整数幂时,可以将取余运算转换为位运算 hash & (length - 1),提高索引的计算效率;
3、由于散列值算法是压缩映射,所以散列表永远无法避免散列冲突,常用的散列冲突解决方法有开放寻址法和分离链表法;
4、开放寻址(Open Addressing)的核心思想是在出现散列冲突时,在数组上重新探测出一个空闲位置。 经典的探测方法有线性探测、平方探测和双散列探测;
5、分离链表法(Separate Chaining)的核心思想是在出现散列冲突时,将冲突的元素添加到同一个桶(Bucket / Slot)中,桶中的元素会组成一个链表,或者跳表、红黑树等动态数据结构;
6、开放寻址法对装载因子敏感,适合于小数据量且装载因子较小的场景。分离链表法对装载因子的容忍度更高,适合于大数据量且大对象(相对于一个指针)的场景;
7、采用的散列冲突解决方法、装载因子和散列函数设计都会影响散列表性能。
今天,我们聊了散列表的整体设计思想。在后续几篇文章里,我们将讨论散列表的具体实现 —— HashMap。请关注。
