论文提出了T2T-ViT模型,引入tokens-to-token(T2T)模块有效地融合图像的结构信息,同时借鉴CNN结果设计了deep-narrow的ViT主干网络,增强特征的丰富性。在ImageNet上从零训练时,T2T-ViT取得了优于ResNets的性能MobileNets性能相当
来源:晓飞的算法工程笔记 公众号
论文: Tokens-to-Token ViT: Training Vision Transformers from Scratch on ImageNet
尽管ViT证明了纯Transformer架构对于视觉任务很有前景,但在中型数据集(例如ImageNet)上从零训练时,其性能仍然不如大小类似的CNN网络(例如 ResNets)。
论文认为这种性能差距源于ViT的两个主要限制:
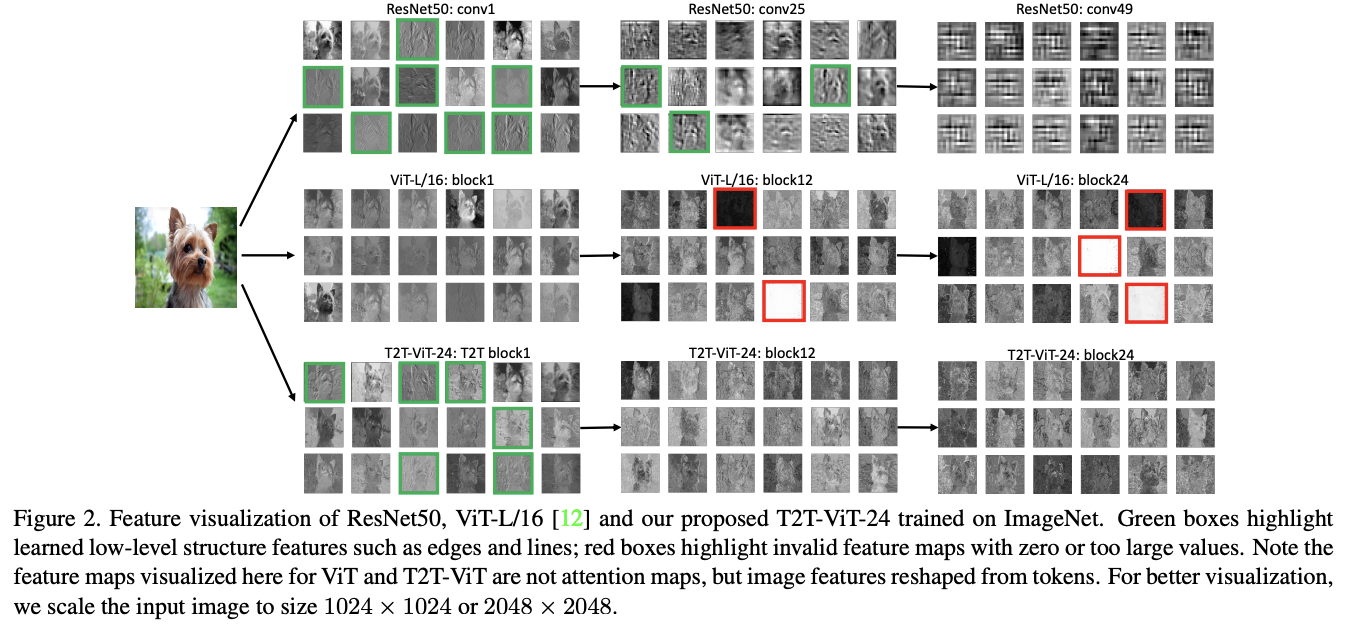
为了验证,论文对ViTL/16和ResNet50学习到的特征进行可视化对比。如图2所示,ResNet逐层捕获所需的局部结构信息(边缘、线条、纹理等),而ViT特征的结构信息建模不佳,所有注意力块都捕获全局关系(例如,整只狗)。这表明,ViT将图像拆分为具有固定长度的token时忽略了局部结构。此外,论文发现ViT中的许多通道的值为零,这意味着ViT的主干网络不如ResNets高效。如果训练样本不足,则只能提供特征的丰富度有限。
基于上面的观察,论文设计了一个新的Vision Transformer模型来克服上述限制:
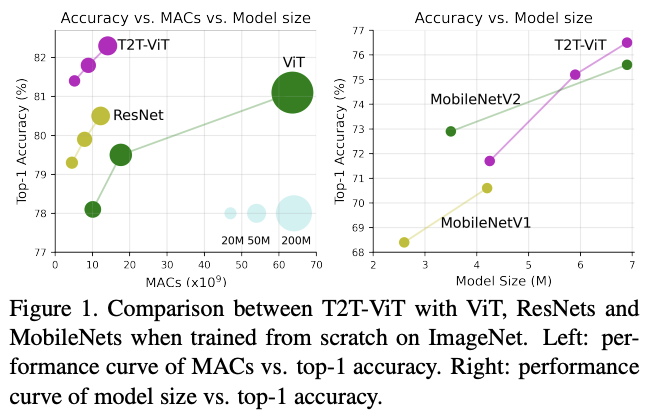
基于T2T模块和deep-narrow主干架构,论文设计了Tokens-to-Token Vision Transformer (T2T-ViT)。对比原生的ViT,在ImageNet上从零开始训练的性能有显着的提高,与CNN网络相当甚至更好。
总体言之,论文的贡献有三方面:
为了克服ViT的简单token生成和低效主干网络的局限性,论文提出了Tokens-to-Token Vision Transformer(T2T-ViT),可以逐步将图像转换为token并且主干网络更高效。因此,T2T-ViT由两个主要组件组成:
Token-to-Token(T2T)模块主要为了克服ViT中简单token生成的限制,逐步将图像结构化为token以及对局部结构信息进行建模,并且可以迭代地减少token数量。每个T2T操作都包含两个步骤:Re-structurization和Soft Split(SS)。

如图 3 所示,给定token序列\(T\),先通过自注意模块(T2T Transformer)进行变换:

其中MSA为具有层归一化的多头自注意操作,MLP是标准Transformer中具有层归一化的多层感知器。MSA输出的\(T^{'}\)将被重塑为空间维度上的图像:

Reshape表示将\(T^{'}\in \mathbb{R}^{l\times c}\)重新组织为\(I\in \mathbb{R}^{h\times w\times c}\),其中\(l\)是\(T^{'}\)的长度,h、w、c 分别是高度、宽度和通道数,并且\(l=h\times w\)。
如图3所示,在获得重构图像\(I\)后,使用Soft Split来建模局部结构信息并减少token的长度。为了避免信息丢失,将图像拆分为重叠的分割区域,每个区域都与周围的区域相关。这样就建立了一个先验,即相邻分割区域生成的token之间应该有更强的相关性。随后将每个分割区域中的token拼接为一个token,从周围的像素或token中聚合局部信息。
进行Soft Split时,每个分割区域的大小为\(k\times k\),区域重叠为\(s\),图像边界填充为\(p\),其中\(k-s\)类似于卷积操作中的步长。对于重建图像\(I\in \mathbb{R}^{h\times w\times c}\),Soft Split后输出的token \(T_{o}\)的长度为:

每个分割区域的大小为\(k\times k\times c\),将所有分割区域展平后得到token序列\(T_{o}\in \mathbb{R}^{l_{o}\times ck^2}\)。在Soft Split之后,输出token可进行下一轮T2T操作。
通过反复进行Re-structurization和Soft Split,T2T模块可以逐步减少token的长度以及变换图像的空间结构。T2T模块的迭代过程可以表述为:
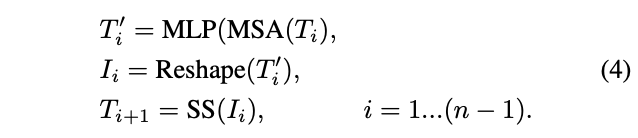
对于输入图像\(I_{0}\),先应用Soft Split将其拆分为token序列\(T_{1} = SS(I_{0})\)。在最后一次迭代之后,T2T模块的输出固定长度的token序列\(T_{f}\)。因此,T2T-ViT 的主干网络可以在\(T_{f}\)上建模全局关系。
此外,由于T2T模块中的token长度大于ViT中的一般设置(16 × 16),MAC和内存使用量都很大。为了解决这个问题,将T2T层的通道维度设置为较小的值(32或64)来减少 MAC,也可以采用高效的Transformer层变种,例如 Performer层,从而在有限的GPU内存下减少内存使用。
由于ViT主干网络中许多通道是无效的,论文打算为T2T-ViT重新设计一个高效的主干网络,减少冗余并提高特征丰富度。论文借鉴了CNN的一些设计,探索不同的ViT架构设计。由于每个Transformer层都具有ResNets的短路连接,可以参考DenseNet增加特征复用和特征丰富程度,或者参考Wide-ResNets和ResNeXt调整通道维度和head数。
论文在ViT上探索了以下五种CNN的架构设计:
论文对以上结构移植进行了实验,有以下两点发现:
基于这些发现,论文为T2T-ViT主干网络设计了一个 deep-narrow的架构,具有较小的通道数和隐藏维度\(d\),但层数\(b\)更多。对于T2T模块输出的固定长度的token序列\(T_{f}\),为其添加一个class token,然后加入Sinusoidal Position Embedding(PE),最后与ViT一样进行分类:
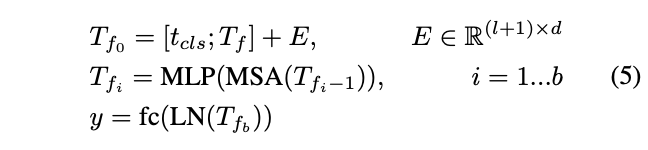
其中,\(E\)是Sinusoidal Position Embedding,LN是层归一化,fc是用于分类的全连接层,\(y\)是输出预测。
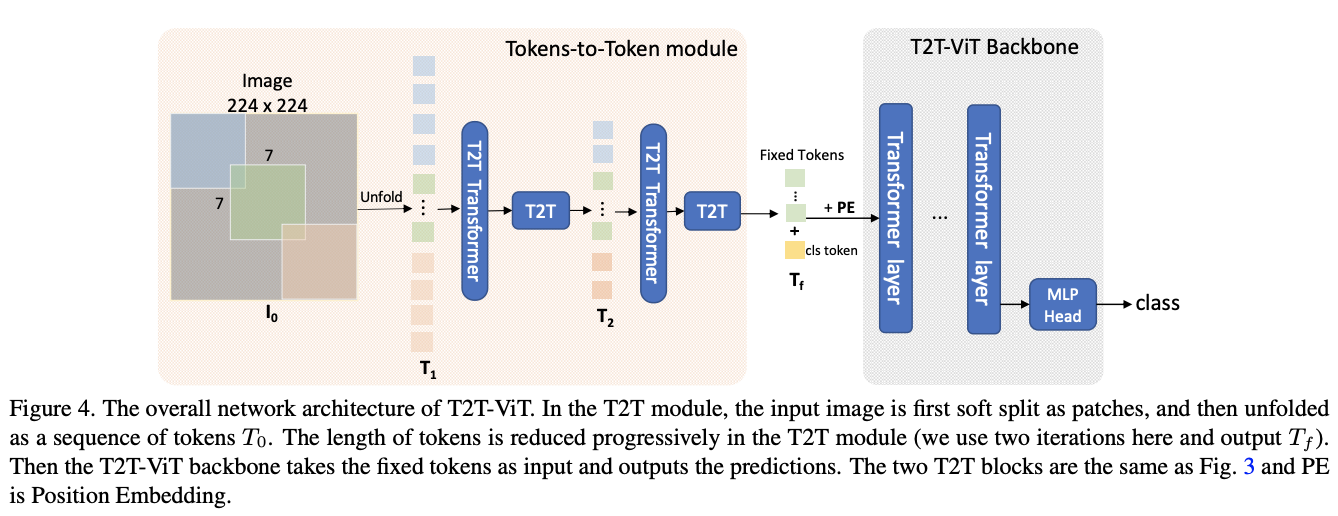
T2T-ViT包含两部分:Tokens-to-Token(T2T)模块和T2T-ViT主干网络。T2T模块有多种设计选择,论文设置\(n = 2\),T2T模块中有\(n+1=3\)次Soft Split和\(n=2\)次Re-structurization。三次Soft Split的分区区域设置为\(P = [7, 3, 3]\),重叠区域设置为\(S=[3, 1, 1]\),可以将\(224\times 224\)的输入图片压缩为\(14\times 14\)的token序列。
T2T-ViT主干网络从T2T模块中取固定长度token序列作为输入,基于deep-narrow架构设计,中间特征维度(256-512)和MLP大小(512-1536)比ViT小很多。例如,T2T-ViT-14的主干网络中有14个Transofmer层,中间特征维度为384,而ViT-B/16有12个Transformer层,中间特征维度为768,参数量和MACs是T2T-ViT-14的3倍。
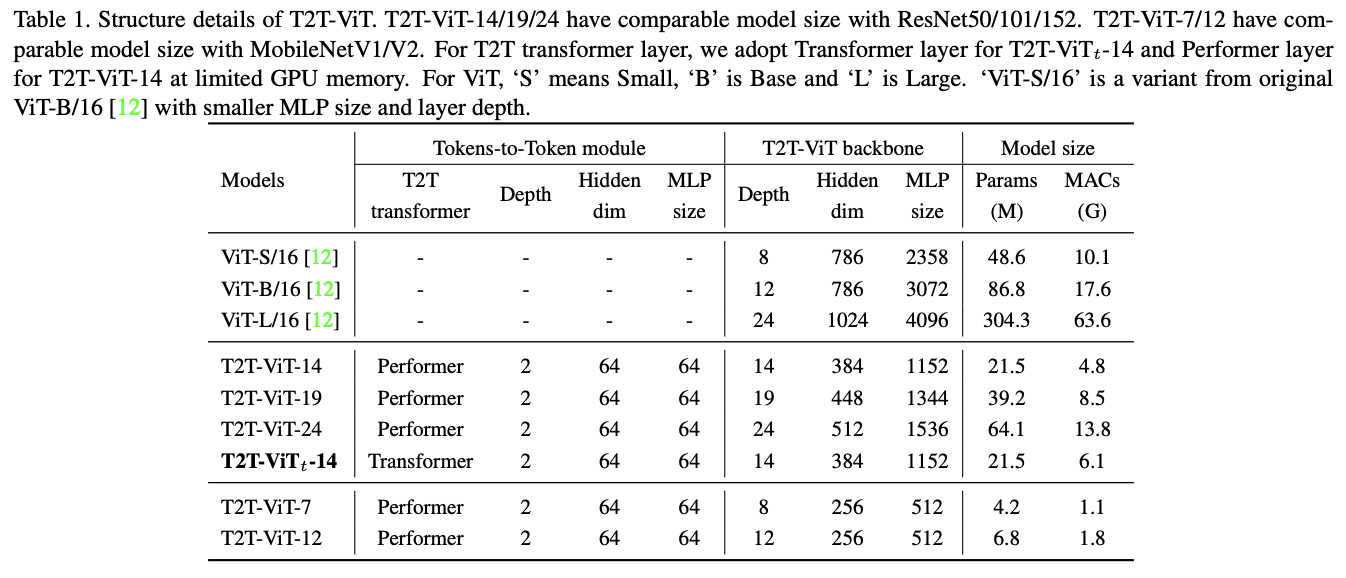
为了方便与ResNet进行比较,论文设计了三个的T2T-ViT模型:T2T-ViT-14、T2T-ViT-19 和 T2T-ViT-24,参数量分别与ResNet50、ResNet101和ResNet152相当。而为了与MobileNets等小型模型进行比较,论文设计了两个lite模型:T2T-ViT-7、T2TViT-12,其模型大小与MibileNetV1和MibileNetV2相当。两个lite TiT-ViT没有使用特殊设计或技巧,只是简单地降低了层深度、中间特征维度以及MLP比例。
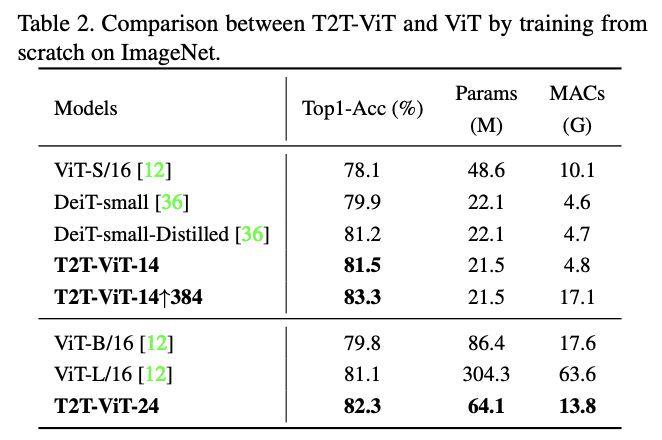
与ViT的从零训练对比。
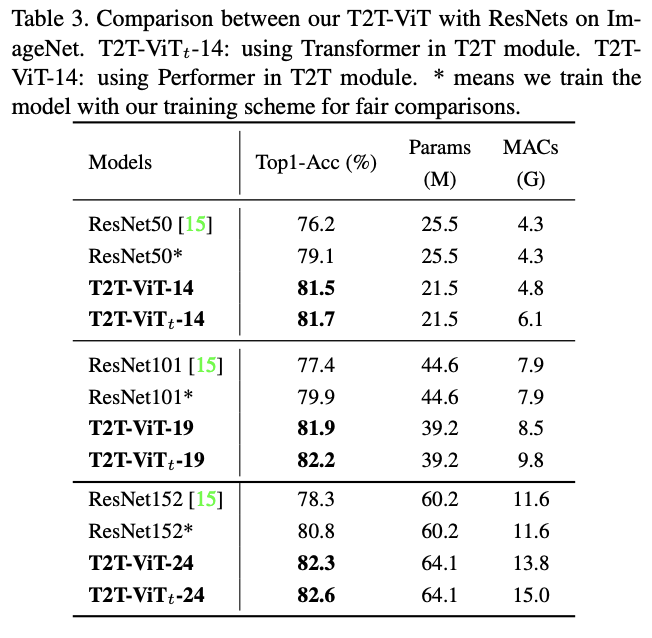
与ResNet对比。
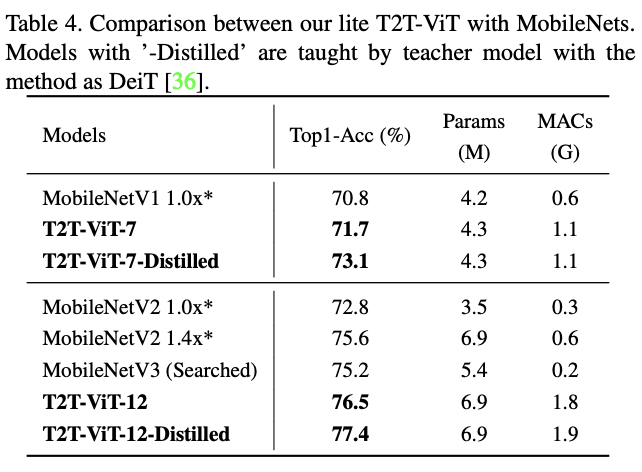
与MobileNet对比。
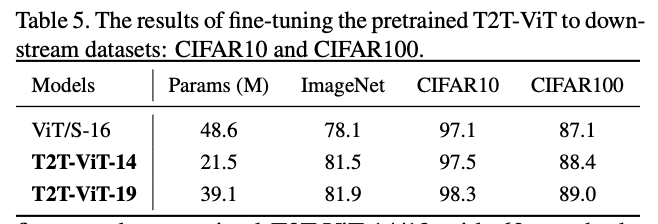
对预训练模型进行迁移至CIFAR进行finetune对比。
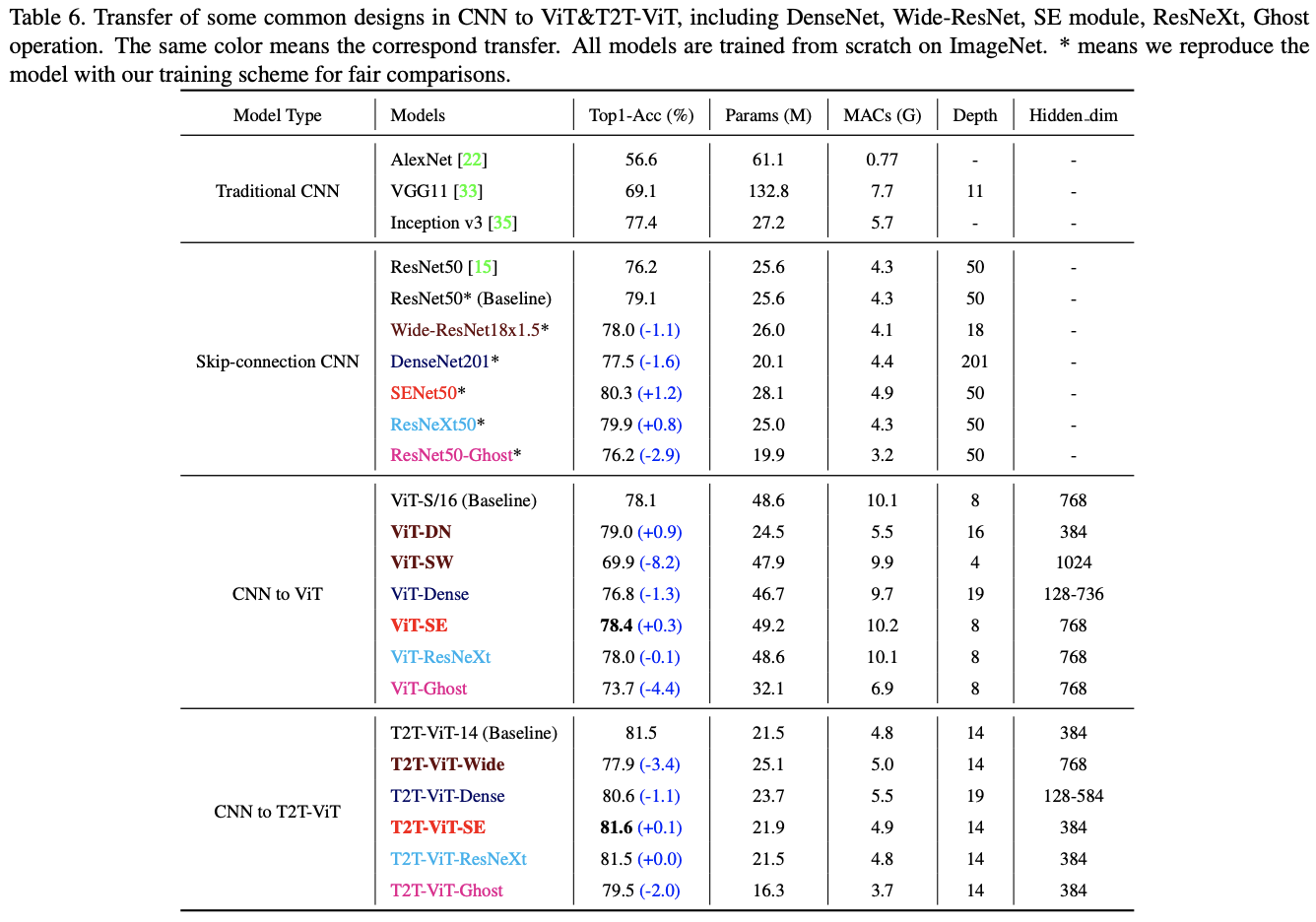
对比不同类型的网络以及对T2T-ViT的修改。
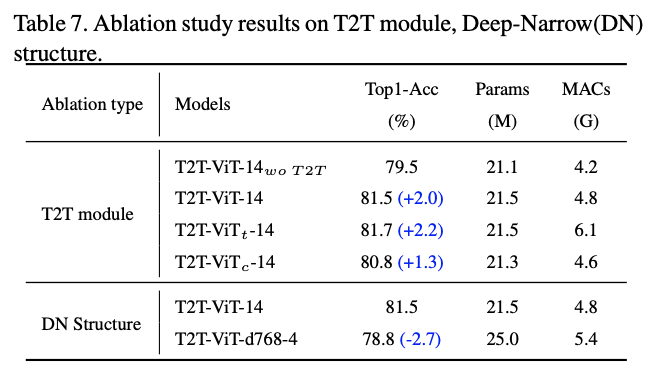
模块对比实验,c是用3个卷积代替T2T模块。
论文提出了T2T-ViT模型,引入tokens-to-token(T2T)模块有效地融合图像的结构信息,同时借鉴CNN结果设计了deep-narrow的ViT主干网络,增强特征的丰富性。在ImageNet上从零训练时,T2T-ViT取得了优于ResNets的性能MobileNets性能相当。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
