这里分享嵌入式领域有用有趣的项目/工具以及一些热点新闻,农历年分二十四节气,希望在每个交节之日准时发布一期。
本期刊是开源项目(GitHub: JayHeng/pzh-mcu-bi-weekly),欢迎提交 issue,投稿或推荐你知道的嵌入式那些事儿。
上期回顾 :《痞子衡嵌入式半月刊: 第 99 期》
历史上的今天:1951年5月12日,第一颗氢弹爆炸试验成功。
本期共收录 4 个项目,希望对你有帮助!
GT-HMI 是国产开源 GUI 框架及永久免费设计软件。它提供创建具有易于使用的图形元素,精美的视觉效果和低内存占用的嵌入式 GUI 所需的一切。针对国内市场及用户需求,使用习惯进行了优化设计,为国内工程师量身打造!产品由中国高通 GENITOP 倾心打造,继承了中国高通 30 年的汉显技术及汉字技术积累。产品分为上位机 GT-HMI Designer 和下位机 GT-HMI Engine。
GT-HMI 特性:
- 上位机设计软件 GT-HMI Designer 永久免费,下位机技术框架 GT-HMI Engine 开源,使用无拘束; - GT-HMI Designer 内嵌下位机技术框架编译器,可自动生成下位机代码; - 提供 GT-HMI 模块,已适配 GT-HMI 上下位机软件及驱动,可以用于前期开发调试,也可以直接作为显示模块使用; - 多平台兼容,移植便捷; - 上位机设计软件 GT-HMI Designer; - 可直接生成交互代码,免去写代码的繁琐工作; - 模拟器仿真即见即所得; - 内置了大量常用的组件,如按钮、文本框、进度条、单选框等; - 支持高通全系列点阵/矢量字库,支持中外文及小语种,多种字号及字体; - 内置中英文及数字输入法; - 持续更新的 GUI 示例库和 UI 资源库; - 下位机技术框架 GT-HMI Engine; - 纯 C 语言编写,使用无门槛; - 小巧高效,不限平台,最小仅需 24K RAM+32K FLASH,可运行在 Cortex-ARM M0\M3 等小资源平台; - 移植便捷,切换平台只需移植定时器、TP 和 LCD 接口,并提供移植教程及示例; - 丰富详实的例程,配套的开发套件易于上手; - 支持自定义功能开发,可用 GT-HMI Engine 自定义控件和功能,组合进 GT-HMI Designer 生成的标准代码; - 带系统(如 RTOS、Linux 等)和裸机均可使用。复制
inav 是一款基于 STM32F411 设计的导航飞行控制器,全开源,给功能非常强大,目前版本已经演进到 V7。
inav 特性:
- 运行在最流行的STM32F4, AT32, STM32F7和STM32H7飞行控制器 - 屏幕显示(OSD) -字符和像素样式 - DJI OSD集成:所有元素,系统消息和警告 - 出色的开箱即用性能 - 保持位置,保持高度,返回家园和航路点任务 - 优秀的固定翼无人机支持:飞机,飞翼 - 黑匣子飞行记录器记录 - 先进陀螺仪滤波 - 完全可配置的混合器,允许运行任何硬件:多旋翼,固定翼,漫游者,船和其他实验设备 - 多种传感器支持:GPS,皮托管,声纳,激光雷达,温度,ESC与BlHeli_32遥测 - 逻辑条件,全局函数和全局变量:你可以用GUI编程INAV - SmartAudio和IRC Tramp VTX支持 - 遥测:SmartPort, FPort, MAVlink, LTM, CRSF - 多色RGB LED带支持 - 屏幕显示(OSD) -字符和像素样式复制
betaflight 是用于多旋翼飞行器和固定翼飞行器飞行的飞行控制器软件(固件)。这个分叉与Baseflight和Cleanflight的不同之处在于,它专注于飞行性能,领先的功能添加和广泛的目标支持。
betaflight 特性:
- 支持多色RGB LED条(每个LED可以是不同的颜色,使用可变长度WS2811可寻址RGB条-用于方向指示,低电量警告,飞行模式状态,初始化故障排除等) - DShot(150,300和600),Multishot, Oneshot(125和42)和Proshot1000电机协议支持 - 黑匣子飞行记录仪记录(如果配备了机载闪存或外置microSD卡) - 支持使用STM32 F4, G4, F7和H7处理器的目标 - PWM, PPM, SPI和串行(SBus, SumH, SumD,频谱1024/2048,XBus等)RX连接与故障安全检测 - 多种遥测协议(CRSF, FrSky, HoTT smart-port, MSP等) - RSSI通过ADC -使用ADC读取PWM RSSI信号,用FrSky D4R-II, X8R, X4R-SB和XSR进行测试 - OSD支持和配置,无需第三方OSD软件/固件/通信设备 - OLED显示器-显示信息:电池电压/电流/毫安时,配置文件,速率配置文件,模式,版本,传感器等 - 飞行中手动PID调整和速率调整 - 使用滑块进行PID和滤波器调谐 - 速率配置文件和它们的飞行选择 - 可配置串行端口,用于串行RX,遥测,ESC遥测,MSP, GPS, OSD,声纳等-使用任何端口上的大多数设备,包括softserial复制
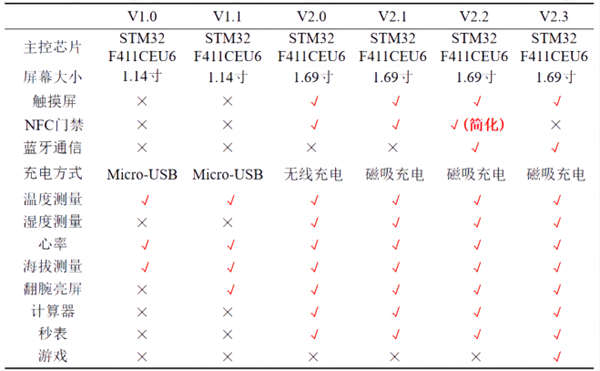
OV-Watch 是一个基于STM32, FreeRTOS, LVGL的功能强大的智能手表设计。软硬件全开源,目前版本是 V2.3。手表的模式分为3个。第一个是正常的运行模式,手表正常运行;第二个是睡眠模式,MCU进入STOP模式,MPU6050仍在记步数;第三个是关机模式,TPS63020直接关闭使能,此时无3V3供电,只有Vbat有供电。

从 V1.0 到 V2.3 的版本功能演进:
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。
