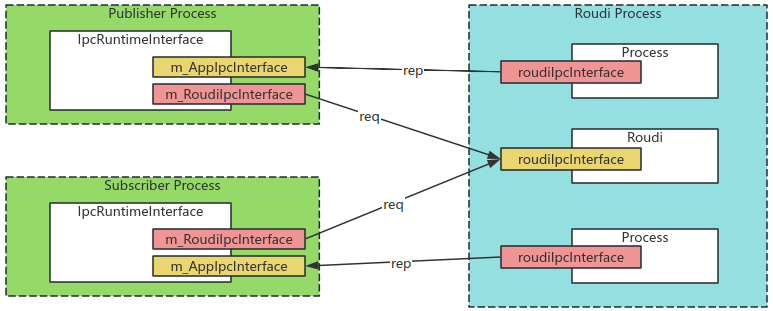
通过前面的介绍,订阅者、发布者与Roudi守护进程之间也需要通信,如上文介绍的,请求Roudi守护进村创建并配置端口数据。整体结构如下图所示:
由于通信层在类Unix操作系统和Windows操作系统下实现不同(见下面的代码片段),所以我们分开介绍其实现。
#if defined(_WIN32)
using IoxIpcChannelType = iox::posix::NamedPipe;
#else
using IoxIpcChannelType = iox::posix::UnixDomainSocket;
#endif
接下来我们从数据的序列化和反序列化开始。
前一篇文章中,这部分通信没有使用三方框架,使用简单的字符串拼接的方式进行序列化,如下所示:
template <typename T>
void IpcMessage::addEntry(const T& entry) noexcept
{
std::stringstream newEntry;
newEntry << entry;
if (!isValidEntry(newEntry.str()))
{
LogError() << "\'" << newEntry.str().c_str() << "\' is an invalid IPC channel entry";
m_isValid = false;
}
else
{
m_msg.append(newEntry.str() + m_separator);
++m_numberOfElements;
}
}
template <typename T>
IpcMessage& IpcMessage::operator<<(const T& entry) noexcept
{
addEntry(entry);
return *this;
}
上面的代码较为简单,这里不作详细解释了。反序列化也很简单,这里就贴一下代码了,非常简单粗暴的实现:
std::string IpcMessage::getElementAtIndex(const uint32_t index) const noexcept
{
std::string messageRemainder(m_msg);
size_t startPos = 0u;
size_t endPos = messageRemainder.find_first_of(m_separator, startPos);
for (uint32_t counter = 0u; endPos != std::string::npos; ++counter)
{
if (counter == index)
{
return messageRemainder.substr(startPos, endPos - startPos);
}
startPos = endPos + 1u;
endPos = messageRemainder.find_first_of(m_separator, startPos);
}
return std::string();
}
正如在 引言 中介绍的,类Unix系统使用Unix域套接字实现IPC通信机制。由UnixDomainSocket封装初始化、销毁、发送和接收等逻辑,这里我们主要介绍发送和接收逻辑的具体实现。
职责:
封装客户端的消息发送逻辑
参数:
msg:待发送的消息。cxx::expected<IpcChannelError> UnixDomainSocket::send(const std::string& msg) const noexcept
{
// we also support timedSend. The setsockopt call sets the timeout for all further sendto calls, so we must set
// it to 0 to turn the timeout off
return timedSend(msg, units::Duration::fromSeconds(0ULL));
}
发送函数send只是简单地调用地超时时间的发送函数timedSend。输入的超时时间为0,意味着立即发送。timedSend的实现如下所示:
cxx::expected<IpcChannelError> UnixDomainSocket::timedSend(const std::string& msg,
const units::Duration& timeout) const noexcept
{
if (msg.size() > m_maxMessageSize)
{
return cxx::error<IpcChannelError>(IpcChannelError::MESSAGE_TOO_LONG);
}
if (IpcChannelSide::SERVER == m_channelSide)
{
std::cerr << "sending on server side not supported for unix domain socket \"" << m_name << "\"" << std::endl;
return cxx::error<IpcChannelError>(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
auto tv = timeout.timeval();
auto setsockoptCall = posixCall(iox_setsockopt)(m_sockfd, SOL_SOCKET, SO_SNDTIMEO, &tv, sizeof(tv))
.failureReturnValue(ERROR_CODE)
.ignoreErrnos(EWOULDBLOCK)
.evaluate();
if (setsockoptCall.has_error())
{
return cxx::error<IpcChannelError>(convertErrnoToIpcChannelError(setsockoptCall.get_error().errnum));
}
auto sendCall = posixCall(iox_sendto)(m_sockfd, msg.c_str(), msg.size() + NULL_TERMINATOR_SIZE, 0, nullptr, 0)
.failureReturnValue(ERROR_CODE)
.evaluate();
if (sendCall.has_error())
{
return cxx::error<IpcChannelError>(convertErrnoToIpcChannelError(sendCall.get_error().errnum));
}
return cxx::success<void>();
}
逐段代码分析:
LINE 04 ~ LINE 13: 错误处理——消息长度过长、类型服务端。整体结构图中,黄色的
LINE 15 ~ LINE 24: 调用POSIX接口(类Unix系统调用)setsockopt,设置超时时间。
LINE 25 ~ LINE 32: 调用POSIX接口(类Unix系统调用)sendto发送数据。
可以看到,Unix版本的发送实现就是简单地调用系统调用。
职责:
封装消息接收逻辑。
返回:
消息字符串或错误类型。
cxx::expected<std::string, IpcChannelError> UnixDomainSocket::receive() const noexcept
{
// we also support timedReceive. The setsockopt call sets the timeout for all further recvfrom calls, so we must set
// it to 0 to turn the timeout off
struct timeval tv = {};
tv.tv_sec = 0;
tv.tv_usec = 0;
return timedReceive(units::Duration(tv));
}
接收函数receive只是简单地调用地超时时间的发送函数timedReceive。输入的超时时间为0,即没有结果立即返回。timedReceive的实现如下所示:
cxx::expected<std::string, IpcChannelError>
UnixDomainSocket::timedReceive(const units::Duration& timeout) const noexcept
{
if (IpcChannelSide::CLIENT == m_channelSide)
{
std::cerr << "receiving on client side not supported for unix domain socket \"" << m_name << "\"" << std::endl;
return cxx::error<IpcChannelError>(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
auto tv = timeout.timeval();
auto setsockoptCall = posixCall(iox_setsockopt)(m_sockfd, SOL_SOCKET, SO_RCVTIMEO, &tv, sizeof(tv))
.failureReturnValue(ERROR_CODE)
.ignoreErrnos(EWOULDBLOCK)
.evaluate();
if (setsockoptCall.has_error())
{
return cxx::error<IpcChannelError>(convertErrnoToIpcChannelError(setsockoptCall.get_error().errnum));
}
// NOLINTJUSTIFICATION needed for recvfrom
// NOLINTNEXTLINE(hicpp-avoid-c-arrays, cppcoreguidelines-avoid-c-arrays)
char message[MAX_MESSAGE_SIZE + 1];
auto recvCall = posixCall(iox_recvfrom)(m_sockfd, &message[0], MAX_MESSAGE_SIZE, 0, nullptr, nullptr)
.failureReturnValue(ERROR_CODE)
.suppressErrorMessagesForErrnos(EAGAIN, EWOULDBLOCK)
.evaluate();
message[MAX_MESSAGE_SIZE] = 0;
if (recvCall.has_error())
{
return cxx::error<IpcChannelError>(convertErrnoToIpcChannelError(recvCall.get_error().errnum));
}
return cxx::success<std::string>(&message[0]);
}
逐段代码分析:
LINE 04 ~ LINE 08: 错误处理——通道类型服务端。整体结构图中,黄色的。
LINE 10 ~ LINE 19: 调用POSIX接口(类Unix系统调用)setsockopt,设置超时时间。
LINE 22 ~ LINE 33: 调用POSIX接口(类Unix系统调用)recvfrom接收数据。
由于Windows不支持Unix域套接字,使用共享内存的方式来模拟。每引入一个发布者或订阅者,都需要开辟两条通道——收和发,每条通道会使用单独一块共享内存,即需要开辟两块共享内存。
职责:
封装消息发送逻辑。
参数:
msg:待发送的消息。cxx::expected<IpcChannelError> NamedPipe::send(const std::string& message) const noexcept
{
if (!m_isInitialized)
{
return cxx::error<IpcChannelError>(IpcChannelError::NOT_INITIALIZED);
}
if (message.size() > MAX_MESSAGE_SIZE)
{
return cxx::error<IpcChannelError>(IpcChannelError::MESSAGE_TOO_LONG);
}
cxx::Expects(!m_data->sendSemaphore().wait().has_error());
IOX_DISCARD_RESULT(m_data->messages.push(Message_t(cxx::TruncateToCapacity, message)));
cxx::Expects(!m_data->receiveSemaphore().post().has_error());
return cxx::success<>();
}
逐段代码分析:
LINE 03 ~ LINE 11: 错误处理——未初始化(消息队列共享内存未创建)、消息长度过长。这里没有判断是服务端还是客户端,估计是不同人实现的。
LINE 13 ~ LINE 15: 第14行,往消息队列(共享内存)中存入消息。第13行是通过发送信号量判断消息队列是否已满,若已满,则一直等待,直到接收端读取消息,唤醒发送端。第15行是唤醒接收端读取消息。
iceoryx还提供了timedSend函数,带有超时机制,即超时则发送失败。还提供了不等待的版本trySend,若队列已满,则发送失败。这两个函数本文不做介绍。
职责:
封装消息接收逻辑。
返回:
消息字符串或错误类型。
cxx::expected<std::string, IpcChannelError> NamedPipe::receive() const noexcept
{
if (!m_isInitialized)
{
return cxx::error<IpcChannelError>(IpcChannelError::NOT_INITIALIZED);
}
cxx::Expects(!m_data->receiveSemaphore().wait().has_error());
auto message = m_data->messages.pop();
if (message.has_value())
{
cxx::Expects(!m_data->sendSemaphore().post().has_error());
return cxx::success<std::string>(message->c_str());
}
return cxx::error<IpcChannelError>(IpcChannelError::INTERNAL_LOGIC_ERROR);
}
逐段代码分析:
LINE 03 ~ LINE 06: 错误处理——未初始化(消息队列共享内存未创建)。这里没有判断是服务端还是客户端,估计是不同人实现的。
LINE 08 ~ LINE 14: 第14行,往消息队列(共享内存)中存入消息。第8行是通过接收信号量判断消息队列是否为空,若为空,则一直等待,直到发送端发送消息,唤醒发送端。第12行是唤醒发送端发送消息。
iceoryx还提供了timedReceive函数,带有超时机制,即超时则接收失败。还提供了不等待的版本tryReceive,若队列为空,则接收失败。这两个函数本文不做介绍。
Roudi启动后,会开启一个线程来监听和处理来自客户端(订阅者、发布者)的请求,如下所示:
void RouDi::startProcessRuntimeMessagesThread() noexcept
{
m_handleRuntimeMessageThread = std::thread(&RouDi::processRuntimeMessages, this);
posix::setThreadName(m_handleRuntimeMessageThread.native_handle(), "IPC-msg-process");
}
线程执行函数为processRuntimeMessages,内部就是一个循环,如下所示:
void RouDi::processRuntimeMessages() noexcept
{
runtime::IpcInterfaceCreator roudiIpcInterface{IPC_CHANNEL_ROUDI_NAME};
// the logger is intentionally not used, to ensure that this message is always printed
std::cout << "RouDi is ready for clients" << std::endl;
while (m_runHandleRuntimeMessageThread)
{
// read RouDi's IPC channel
runtime::IpcMessage message;
if (roudiIpcInterface.timedReceive(m_runtimeMessagesThreadTimeout, message))
{
auto cmd = runtime::stringToIpcMessageType(message.getElementAtIndex(0).c_str());
std::string runtimeName = message.getElementAtIndex(1);
processMessage(message, cmd, RuntimeName_t(cxx::TruncateToCapacity, runtimeName));
}
}
}
通过上述代码可知,发送给Roudi的所有消息,第一项为请求类型,第二项为运行。这里调用了processMessage函数,这和上一篇文章中的 3.5 RouDi::processMessage 关联了。