本文分享自华为云社区《确保并发执行的安全性:探索多线程和锁机制以构建可靠的程序》,作者:Lion Long。
函数原型:
#include <pthread.h> int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine) (void *), void *arg); // Compile and link with -pthread.复制
描述:
pthread_create()函数在调用进程中启动一个新线程。新线程通过调用start_routine()开始执行;arg作为start_routine()的唯一参数传递。
新线程以以下方式之一终止:
(1)它调用pthread_exit(),指定一个退出状态值,该值可用于调用pthrread_join()的同一进程中的另一个线程,即pthrread_join()可以接收pthread_exit()返回的值。
(2)它从start_routine()返回。这相当于使用return语句中提供的值调用pthread_exit()。
(3)它被pthread_cancel()取消。
(4)进程中的任何线程都调用exit(),或者主线程执行main()的返回。这将导致进程中所有线程的终止。
参数介绍:
| 参数 | 含义 |
|---|---|
| attr | attr参数指向pthread_attr_t结构,其内容在线程创建时用于确定新线程的属性;使用pthread_attr_init()和相关函数初始化该结构。如果attr为空,则使用默认属性创建线程。 |
| thread | 在返回之前,成功调用pthread_create()将新线程的ID存储在thread指向的缓冲区中;此标识符用于在后续调用其他pthreads函数时引用线程。 |
| start_routine | 线程入口函数 |
| arg | 线程入口函数的参数 |
返回值:
成功时,返回0;出错时,它返回一个错误号,并且*thread的内容未定义。
错误号:
| 错误号 | 含义 |
|---|---|
| EAGAIN | 资源不足,无法创建另一个线程。 |
| AGAIN A | 遇到系统对线程数量施加的限制。可能触发此错误的限制有很多:已达到RLIMIT_NPROC软资源限制【通过setrlimit()设置】,该限制限制了真实用户ID的进程和线程数;已达到内核对进程和线程数的系统范围限制,即/proc/sys/kernel/threads max【请参阅proc()】;或者达到最大pid数/proc/sys/kernel/pid_max【见proc()】。 |
| EINVAL | 属性中的设置无效。 |
| EPERM | 没有设置attr中指定的调度策略和参数的权限。 |
其他:
新线程继承创建线程的信号掩码【pthread_sigmask()】的副本。新线程的挂起信号集为空【sigpending()】。新线程不继承创建线程的备用信号堆栈【sigaltstack()】。
新线程的CPU时间时钟的初始值为0【参见pthread_getcpuclockid()】。
示例代码:
#include <pthread.h> #include <string.h> #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <errno.h> #include <ctype.h> #define handle_error_en(en, msg) \ do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0) #define handle_error(msg) \ do { perror(msg); exit(EXIT_FAILURE); } while (0) struct thread_info { /* Used as argument to thread_start() */ pthread_t thread_id; /* ID returned by pthread_create() */ int thread_num; /* Application-defined thread # */ char *argv_string; /* From command-line argument */ }; /* Thread start function: display address near top of our stack, and return upper-cased copy of argv_string */ static void * thread_start(void *arg) { struct thread_info *tinfo = arg; char *uargv, *p; printf("Thread %d: top of stack near %p; argv_string=%s\n", tinfo->thread_num, &p, tinfo->argv_string); uargv = strdup(tinfo->argv_string); if (uargv == NULL) handle_error("strdup"); for (p = uargv; *p != '\0'; p++) *p = toupper(*p); return uargv; } int main(int argc, char *argv[]) { int s, tnum, opt, num_threads; struct thread_info *tinfo; pthread_attr_t attr; int stack_size; void *res; /* The "-s" option specifies a stack size for our threads */ stack_size = -1; while ((opt = getopt(argc, argv, "s:")) != -1) { switch (opt) { case 's': stack_size = strtoul(optarg, NULL, 0); break; default: fprintf(stderr, "Usage: %s [-s stack-size] arg...\n", argv[0]); exit(EXIT_FAILURE); } } num_threads = argc - optind; /* Initialize thread creation attributes */ s = pthread_attr_init(&attr); if (s != 0) handle_error_en(s, "pthread_attr_init"); if (stack_size > 0) { s = pthread_attr_setstacksize(&attr, stack_size); if (s != 0) handle_error_en(s, "pthread_attr_setstacksize"); } /* Allocate memory for pthread_create() arguments */ tinfo = calloc(num_threads, sizeof(struct thread_info)); if (tinfo == NULL) handle_error("calloc"); /* Create one thread for each command-line argument */ for (tnum = 0; tnum < num_threads; tnum++) { tinfo[tnum].thread_num = tnum + 1; tinfo[tnum].argv_string = argv[optind + tnum]; /* The pthread_create() call stores the thread ID into corresponding element of tinfo[] */ s = pthread_create(&tinfo[tnum].thread_id, &attr, &thread_start, &tinfo[tnum]); if (s != 0) handle_error_en(s, "pthread_create"); } /* Destroy the thread attributes object, since it is no longer needed */ s = pthread_attr_destroy(&attr); if (s != 0) handle_error_en(s, "pthread_attr_destroy"); /* Now join with each thread, and display its returned value */ for (tnum = 0; tnum < num_threads; tnum++) { s = pthread_join(tinfo[tnum].thread_id, &res); if (s != 0) handle_error_en(s, "pthread_join"); printf("Joined with thread %d; returned value was %s\n", tinfo[tnum].thread_num, (char *) res); free(res); /* Free memory allocated by thread */ } free(tinfo); exit(EXIT_SUCCESS); }复制
新线程以以下方式之一终止:
(1)它调用pthread_exit(),指定一个退出状态值,该值可用于调用pthrread_join()的同一进程中的另一个线程,即pthrread_join()可以接收pthread_exit()返回的值。
(2)它从start_routine()返回。这相当于使用return语句中提供的值调用pthread_exit()。
(3)它被pthread_cancel()取消。
(4)进程中的任何线程都调用exit(),或者主线程执行main()的返回。这将导致进程中所有线程的终止。
#include <pthread.h> void pthread_exit(void *retval); // Compile and link with -pthread.复制
描述:
(1)pthread_exit()函数终止调用线程并通过retval返回一个值,该值(如果线程是可连接的)可用于调用pthrea_join()的同一进程中的另一个线程,即可被pthrea_join()接收返回值。
(2)任何由pthread_cleanup_push()建立的尚未弹出的清理处理程序都会弹出(与它们被推送的顺序相反)并执行。如果线程具有任何特定于线程的数据,则在执行清理处理程序后,将以未指定的顺序调用相应的析构函数。
(3)当线程终止时,进程共享资源(例如互斥体、条件变量、信号量和文件描述符)不会被释放,使用atexit()注册的函数也不会被调用。
(4)进程中的最后一个线程终止后,进程通过调用exit()终止,退出状态为零;因此,释放进程共享资源并调用使用atexit()注册的函数。
返回值:此函数不返回调用方。
错误:此函数始终成功。
注意:
(1)从除主线程之外的任何线程的start函数执行返回将导致隐式调用pthread_exit(),使用函数的返回值作为线程的退出状态。
(2)为了允许其他线程继续执行,主线程应该通过调用pthread_exit()而不是exit()来终止。
(3)retval指向的值不应位于调用线程的堆栈上,因为该堆栈的内容在线程终止后未定义。
#include <pthread.h> int pthread_cancel(pthread_t thread); // Compile and link with -pthread.复制
描述:
pthread_cancel()函数向线程thread发送取消请求。目标线程是否以及何时响应取消请求取决于该线程控制的两个属性:其可取消性state和type。
由pthread_setcancelstate()设置线程的可取消状态可以启用(新线程的默认状态)或禁用。如果线程已禁用取消,则取消请求将保持排队状态,直到线程启用取消。如果线程已启用取消,则其可取消性类型决定何时取消。
由pthread_setcanceltype()确定的线程的取消类型可以是异步的或延迟的(新线程的默认值)。异步可取消性意味着线程可以随时取消(通常是立即取消,但系统不保证)。延迟可取消性意味着取消将被延迟,直到线程下一次调用作为取消点的函数。pthreads()中提供了作为或可能是取消点的函数列表。
执行取消请求时,线程将执行以下步骤(按顺序):
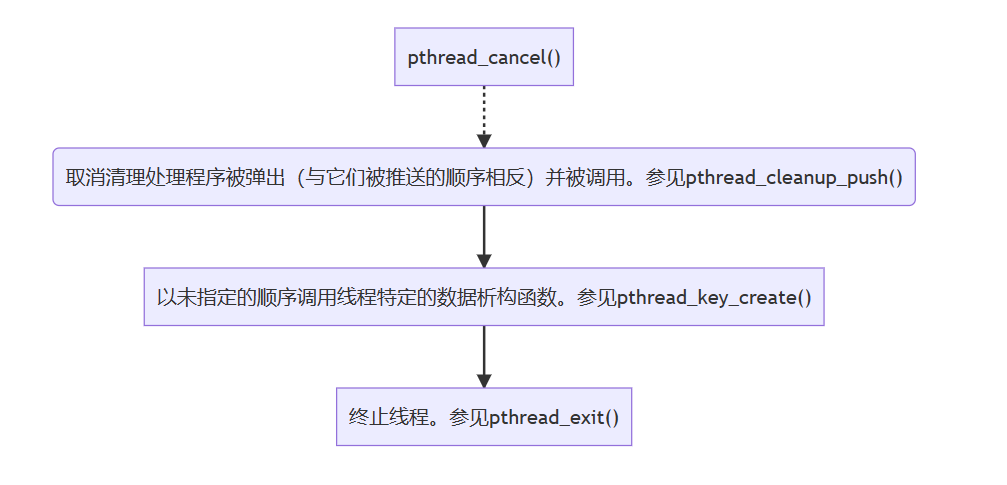
被取消的线程终止后,使用pthread_join()与该线程的连接将获得pthrea_canceled作为线程的退出状态。(使用线程连接是知道取消已完成的唯一方法。)
返回值:成功时,返回0;出错时,返回非零错误号。
错误:ESRCH,找不到ID为thread的线程。
函数原型:
#include <pthread.h> int pthread_join(pthread_t thread, void **retval); // Compile and link with -pthread.复制
描述:
pthread_join()函数等待线程指定的线程终止。如果该线程已经终止,则pthread_join()立即返回。thread指定的线程必须是可连接的。
如果retval不为空,则pthread_join()将目标线程的退出状态(即,目标线程提供给pthrea_exit()的值)复制到retval所指向的位置。如果目标线程被取消,则PTHREAD_CANCELED被置于
如果多个线程同时尝试与同一线程联接,则结果是未定义的。如果调用pthread_join()的线程被取消,那么目标线程将保持可连接状态(即,它不会被分离)。
返回值:成功时,返回0;出错时,它返回错误号。
错误号:
| 错误号 | 含义 |
|---|---|
| EDEADLK | 检测到死锁(例如,两个线程试图彼此连接);或thread指定调用线程。 |
| EINVAL | 线程不是可连接线程。 |
| EINVAL | 另一个线程已在等待加入此线程。 |
| ESRCH | 找不到ID为线程的线程。 |
函数原型:
#include <pthread.h> int pthread_attr_init(pthread_attr_t *attr); int pthread_attr_destroy(pthread_attr_t *attr); // Compile and link with -pthread.复制
描述:
pthread_attr_init()函数使用默认属性值初始化attr指向的线程属性对象。在这个调用之后,可以使用各种相关函数(下方列出)设置对象的各个属性,然后可以在创建线程的一个或多个pthread_create()调用中使用该对象。
pthread_attr_setaffinity_np(), pthread_attr_setdetachstate(), pthread_attr_setguardsize(), pthread_attr_setinheritsched(), pthread_attr_setschedparam(), pthread_attr_setschedpolicy(), pthread_attr_setscope(), pthread_attr_setstack(), pthread_attr_setstackaddr(), pthread_attr_setstacksize(), pthread_create(), pthread_getattr_np(), pthreads()复制
对已初始化的线程属性对象调用pthread_attr_init()会导致未定义的行为。
当不再需要线程属性对象时,应使用pthread_attr_destroy()函数将其销毁。 销毁线程属性对象对使用该对象创建的线程没有影响。
线程属性对象被销毁后,可以使用pthread_attr_init()对其重新初始化。任何其他使用已销毁线程属性对象的方法都会产生未定义的结果。
返回值:
成功时,这些函数返回0;出错时,它们返回一个非零错误号。
错误:
在Linux上,这些函数总是成功的(但可移植和未来验证的应用程序应该处理可能的错误返回)。
pthread_attr_t类型应被视为不透明的:除通过pthreads函数外,对对象的任何访问都是不可移植的,并产生未定义的结果。
示例代码:
#define _GNU_SOURCE /* To get pthread_getattr_np() declaration */ #include <pthread.h> #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <errno.h> #define handle_error_en(en, msg) \ do { errno = en; perror(msg); exit(EXIT_FAILURE); } while (0) static void display_pthread_attr(pthread_attr_t *attr, char *prefix) { int s, i; size_t v; void *stkaddr; struct sched_param sp; s = pthread_attr_getdetachstate(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getdetachstate"); printf("%sDetach state = %s\n", prefix, (i == PTHREAD_CREATE_DETACHED) ? "PTHREAD_CREATE_DETACHED" : (i == PTHREAD_CREATE_JOINABLE) ? "PTHREAD_CREATE_JOINABLE" : "???"); s = pthread_attr_getscope(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getscope"); printf("%sScope = %s\n", prefix, (i == PTHREAD_SCOPE_SYSTEM) ? "PTHREAD_SCOPE_SYSTEM" : (i == PTHREAD_SCOPE_PROCESS) ? "PTHREAD_SCOPE_PROCESS" : "???"); s = pthread_attr_getinheritsched(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getinheritsched"); printf("%sInherit scheduler = %s\n", prefix, (i == PTHREAD_INHERIT_SCHED) ? "PTHREAD_INHERIT_SCHED" : (i == PTHREAD_EXPLICIT_SCHED) ? "PTHREAD_EXPLICIT_SCHED" : "???"); s = pthread_attr_getschedpolicy(attr, &i); if (s != 0) handle_error_en(s, "pthread_attr_getschedpolicy"); printf("%sScheduling policy = %s\n", prefix, (i == SCHED_OTHER) ? "SCHED_OTHER" : (i == SCHED_FIFO) ? "SCHED_FIFO" : (i == SCHED_RR) ? "SCHED_RR" : "???"); s = pthread_attr_getschedparam(attr, &sp); if (s != 0) handle_error_en(s, "pthread_attr_getschedparam"); printf("%sScheduling priority = %d\n", prefix, sp.sched_priority); s = pthread_attr_getguardsize(attr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getguardsize"); printf("%sGuard size = %d bytes\n", prefix, v); s = pthread_attr_getstack(attr, &stkaddr, &v); if (s != 0) handle_error_en(s, "pthread_attr_getstack"); printf("%sStack address = %p\n", prefix, stkaddr); printf("%sStack size = 0x%zx bytes\n", prefix, v); } static void * thread_start(void *arg) { int s; pthread_attr_t gattr; /* pthread_getattr_np() is a non-standard GNU extension that retrieves the attributes of the thread specified in its first argument */ s = pthread_getattr_np(pthread_self(), &gattr); if (s != 0) handle_error_en(s, "pthread_getattr_np"); printf("Thread attributes:\n"); display_pthread_attr(&gattr, "\t"); exit(EXIT_SUCCESS); /* Terminate all threads */ } int main(int argc, char *argv[]) { pthread_t thr; pthread_attr_t attr; pthread_attr_t *attrp; /* NULL or &attr */ int s; attrp = NULL; /* If a command-line argument was supplied, use it to set the stack-size attribute and set a few other thread attributes, and set attrp pointing to thread attributes object */ if (argc > 1) { int stack_size; void *sp; attrp = &attr; s = pthread_attr_init(&attr); if (s != 0) handle_error_en(s, "pthread_attr_init"); s = pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED); if (s != 0) handle_error_en(s, "pthread_attr_setdetachstate"); s = pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED); if (s != 0) handle_error_en(s, "pthread_attr_setinheritsched"); stack_size = strtoul(argv[1], NULL, 0); s = posix_memalign(&sp, sysconf(_SC_PAGESIZE), stack_size); if (s != 0) handle_error_en(s, "posix_memalign"); printf("posix_memalign() allocated at %p\n", sp); s = pthread_attr_setstack(&attr, sp, stack_size); if (s != 0) handle_error_en(s, "pthread_attr_setstack"); } s = pthread_create(&thr, attrp, &thread_start, NULL); if (s != 0) handle_error_en(s, "pthread_create"); if (attrp != NULL) { s = pthread_attr_destroy(attrp); if (s != 0) handle_error_en(s, "pthread_attr_destroy"); } pause(); /* Terminates when other thread calls exit() */ }复制
在多个线程中,对一个变量不断操作,如果没有原子操作会怎么样?
示例代码:
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { (*pcount)++; usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 10; i++) { printf("count = %d\n", count); sleep(1); } return 0; }复制
上述代码执行结果理论上是1000000,但是最后结果是994656。也就是无原子操作下的执行结果小于理论值。
原因在于,执行idx++时汇编代码是:
Mov [idx], %eax Inc %eax Mov %eax,[idx]复制
也就是c语言是一条语句,但真正执行时是三条命令。在无原子操作时,就可能出现如下情况:
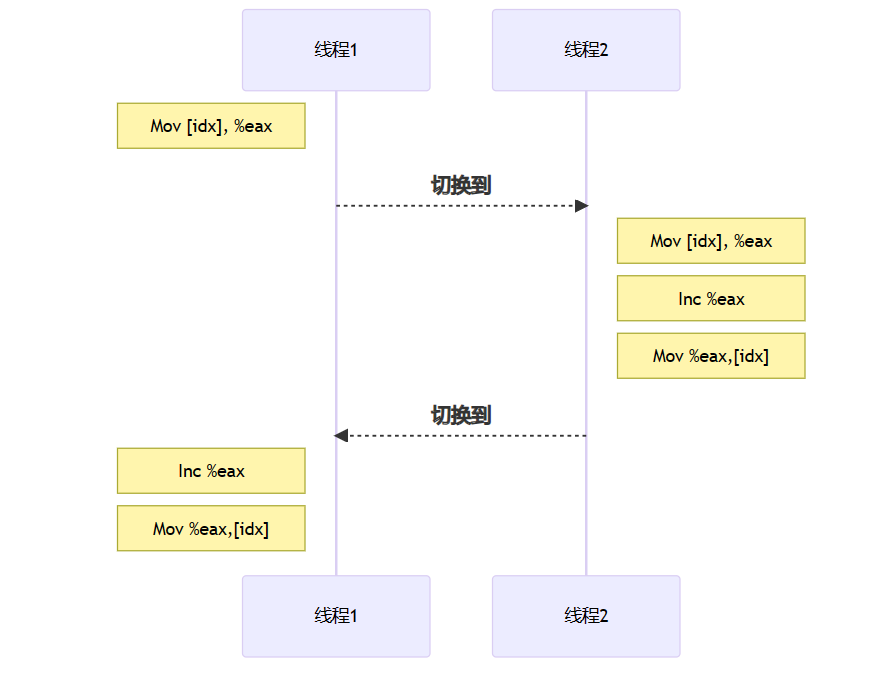
原意要自增两次,然而实际只自增了一次,因此无原子操作下的执行结果小于理论值。
让临界资源只允许在一个线程中执行。
函数原型:
#include <pthread.h> int pthread_mutex_init(pthread_mutex_t *restrict mutex,const pthread_mutexattr_t *restrict attr);复制
函数描述:
互斥锁的初始化。
pthread_mutex_init() 函数是以动态方式创建互斥锁的,参数attr指定了新建互斥锁的属性。如果参数attr为空(NULL),则使用默认的互斥锁属性,默认属性为快速互斥锁 。
互斥锁的属性在创建锁的时候指定,在实现中仅有一个锁类型属性,不同的锁类型在试图对一个已经被锁定的互斥锁加锁时表现不同。
返回:
成功会返回零,其他任何返回值都表示出现了错误。
成功后,互斥锁被初始化为未锁住态。
用于注销一个互斥锁,函数原型:
#include <pthread.h> int pthread_mutex_destroy(pthread_mutex_t *mutex)复制
销毁一个互斥锁即意味着释放它所占用的资源,且要求锁当前处于开放状态。由于在Linux中,互斥锁并不占用任何资源,因此pthread_mutex_destroy()仅仅检查锁状态(锁定状态则返回EBUSY)。
函数原型:
#include <pthread.h> int pthread_mutex_lock(pthread_mutex_t *mutex); int pthread_mutex_trylock(pthread_mutex_t *mutex);复制
描述:
互斥引用的互斥对象通过调用 pthread_mutex_lock()被锁定。如果互斥锁已被锁定,则调用线程将阻塞,直到互斥体变为可用。此操作将返回由处于锁定状态的互斥所引用的互斥对象,其中调用线程是其所有者。
函数 pthread_mutex_trylock()与 pthread_mutex_lock()相同,只是如果互斥引用的互斥对象当前被锁定(由任何线程,包括当前线程锁定),则调用将立即返回。
| 互斥类型 | 含义 |
|---|---|
| PTHREAD_MUTEX_NORMAL | 不提供死锁检测。尝试重新锁定互斥锁会导致死锁。如果线程尝试解锁它尚未锁定的互斥锁或已解锁的互斥体,则会导致未定义的行为。 |
| PTHREAD_MUTEX_ERRORCHECK | 提供错误检查。如果线程尝试重新锁定已锁定的互斥锁,则会返回错误。如果线程尝试解锁尚未锁定的互斥体或已解锁的互斥体,则将返回错误。 |
| PTHREAD_MUTEX_RECURSIVE | 互斥锁将保留锁定计数的概念。当线程首次成功获取互斥锁时,锁定计数将设置为 1。每次线程重新锁定此互斥锁时,锁定计数都会递增 1。每次线程解锁互斥体时,锁定计数都会减少 1。当锁定计数达到零时,互斥锁将可供其他线程获取。如果线程尝试解锁尚未锁定的互斥体或已解锁的互斥体,则将返回错误。 |
| PTHREAD_MUTEX_DEFAULT | 尝试递归锁定互斥会导致未定义的行为。如果互斥体未被调用线程锁定,则尝试解锁该互斥体会导致未定义的行为。如果互斥体未锁定,则尝试解锁互斥体会导致未定义的行为。 |
返回值:
如果成功,pthread_mutex_lock()和 pthread_mutex_unlock() 函数返回零。否则,将返回一个错误号以指示错误。
如果获取了互斥引用的互斥对象上的锁,则函数 pthread_mutex_trylock() 返回零。否则,将返回一个错误号以指示错误。
如果出现以下情况,pthread_mutex_lock()和pthread_mutex_trylock()函数将失败:
| 错误代码 | 含义 |
|---|---|
| EINVAL | 互斥体是使用具有值PTHREAD_PRIO_PROTECT的协议属性创建的,并且调用线程的优先级高于互斥体的当前优先级上限。 |
| EBUSY | 无法获取互斥体,因为它已被锁定。 |
| EINVAL | 互斥体指定的值不引用初始化的互斥体对象。 |
| EAGAIN | 无法获取互斥锁,因为已超过互斥锁的最大递归锁数。 |
| EDEADLK | 当前线程已拥有互斥体。 |
| EPERM | 当前线程不拥有互斥体。 |
这些函数不会返回错误代码EINTR。
函数原型:
#include <pthread.h> int pthread_mutex_unlock(pthread_mutex_t *mutex);复制
描述:
pthread_mutex_unlock() 函数释放互斥引用的互斥对象。释放互斥体的方式取决于互斥体的 type 属性。如果在调用 pthread_mutex_unlock()时,互斥所引用的互斥对象上存在阻塞的线程,从而导致互斥体变为可用,则调度策略用于确定哪个线程应获取互斥。(在PTHREAD_MUTEX_RECURSIVE互斥锁的情况下,当计数达到零并且调用线程不再对此互斥锁时,互斥锁将变为可用)。
如果信号被传递到等待互斥体的线程,则在信号处理程序返回时,线程将恢复等待互斥体,就好像它没有被中断一样。
返回值:
如果成功,返回零。否则,将返回一个错误号以指示错误。
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #define ADD_MUTEX_LOCK 1 #if ADD_MUTEX_LOCK pthread_mutex_t mutex; #endif // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { #if 0 (*pcount)++; #elif ADD_MUTEX_LOCK pthread_mutex_lock(&mutex); (*pcount)++; pthread_mutex_unlock(&mutex); #endif usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; #if ADD_MUTEX_LOCK pthread_mutex_init(&mutex, NULL); #endif int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } return 0; }复制
上述代码执行结果是1000000。也就是互斥锁下的执行结果等于理论值。
自旋锁的接口和mutex类似。
函数原型:
#include <pthread.h> // 1. 销毁自旋锁 int pthread_spin_destroy(pthread_spinlock_t *lock); // 2. 初始化自旋锁 int pthread_spin_init(pthread_spinlock_t *lock, int attr); // 3. 自旋锁上锁(阻塞) int pthread_spin_lock(pthread_spinlock_t *lock); // 4. 自旋锁上锁(非阻塞) int pthread_spin_trylock(pthread_spinlock_t *lock); // 5. 自旋锁解锁 int pthread_spin_unlock(pthread_spinlock_t *lock); 以上函数成功都返回0.复制
示例代码
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #define ADD_MUTEX_LOCK 0 #define ADD_SPIN_LOCK 1 #if ADD_MUTEX_LOCK pthread_mutex_t mutex; #endif #if ADD_SPIN_LOCK pthread_spinlock_t spinlock; #endif // 10 * 100000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 100000) { #if 0 (*pcount)++; #elif ADD_MUTEX_LOCK pthread_mutex_lock(&mutex); (*pcount)++; pthread_mutex_unlock(&mutex); #elif ADD_SPIN_LOCK pthread_spin_lock(&spinlock); (*pcount)++; pthread_spin_unlock(&spinlock); #endif usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; #if ADD_MUTEX_LOCK pthread_mutex_init(&mutex, NULL); #elif ADD_SPIN_LOCK pthread_spin_init(&spinlock, PTHREAD_PROCESS_SHARED); #endif int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } return 0; }复制
上述代码执行结果是1000000。也就是自旋锁下的执行结果等于理论值。
互斥锁与自旋锁的区别:
死锁,死锁的两种情况:
(1)如果两个线程先后调用两次lock,第二次调用lock时,由于锁已被占用,该线程会挂起等待别的线程释放锁,然后锁正是被自己占用着的,该线程又被挂起不能释放锁,因此就永远处于挂起等待状态了,进入死锁。
(2)线程1和线程2。线程1获得锁1,线程2获得锁2,此时线程1调用lock企图获得锁2,结果是需要挂起等待线程2释放锁2,而此时线程2也调用了lock企图获得锁1,结果是线程2挂起等待线程1释放锁1,进入死锁。
避免死锁:
(1)共享资源操作前一定要获得锁。
(2)完成操作以后一定要释放锁。
(3)尽量短时间地占用锁。
(4)有多锁, 如获得顺序是abc连环扣, 释放顺序也应该是abc。
(5)线程错误返回时应该释放它所获得的锁。
(6)写程序是尽量避免同时获得多个锁。如果一定要这么做,所有线程在需要多个锁时都按相同的先后顺序获得锁,则不会出现死锁。
原子操作就是用一条指令解决问题;多条执行命令变为一条执行命令,使其不可分割。
CAS,全称Compare And Swap。翻译过来就是先比较再赋值,顺序不可变;也就是先对比,如果值一致再赋值,如果不一致就不赋值。
常见的原子操作:
(1)加,add
(2)减,sub
(3)自增,inc
(4)自减,dec
(5)比较赋值,cas
注意,c语言的一条语句执行可能有副作用,但原子操作是没有副作用的。
示例代码:
#include <stdio.h> #include <pthread.h> #include <unistd.h> #define THREAD_SIZE 10 #include <sys/time.h> #define TIME_SUB_MS(tv1, tv2) ((tv1.tv_sec - tv2.tv_sec) * 1000 + (tv1.tv_usec - tv2.tv_usec) / 1000) // 原子操作 int inc(int *value,int add) { int old; __asm__ volatile( "lock; xaddl %2, %1;" : "=a" (old) : "m" (*value),"a"(add) : "cc","memory" ); return old; } // 10 * 1000000 void *func(void *arg) { int *pcount = (int *)arg; int i = 0; while (i++ < 1000000) { inc(pcount, 1); //usleep(1); } } int main(int argc, char **argv) { pthread_t threadid[THREAD_SIZE] = { 0 }; // 统计执行时间 struct timeval tv_start; gettimeofday(&tv_start, NULL); int i = 0; int count = 0; for (i = 0; i < THREAD_SIZE; i++) { pthread_create(&threadid[i], NULL, func, &count); } #if 0 // 1000w for (i = 0; i < 50; i++) { printf("count = %d\n", count); sleep(1); } #else for (i = 0; i < THREAD_SIZE; i++) { pthread_join(threadid[i], NULL); // } #endif struct timeval tv_end; gettimeofday(&tv_end, NULL); int time_used = TIME_SUB_MS(tv_end, tv_start); printf("time_used: %d\n", time_used); return 0; }复制
对临界资源操作时,常用原子操作和锁。
锁有互斥锁、自旋锁、读写锁等,其他应用程序实现的业务锁如悲观锁、乐观锁等。
在两种情况下容易陷入死锁:
(1)线程调用两次lock,第一次已经获得锁,第二次发现锁已占用进入等待,而锁是被自己占用,进入无线等待的死锁。
(2)多个线程多个锁的情况,线程1获得锁1然后请求锁2,线程2获得锁2然后请求锁1,互相等待,进入锁。
原子操作就是通过一条指令解决问题,封装的CAS将多条执行命令变为一条执行命令,使其不可分割。