《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
先 导 课
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------









6.1 底盘运动学模型
①两轮差速模型
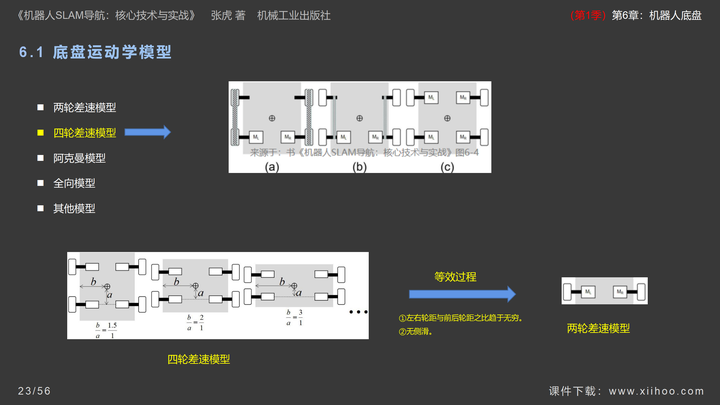
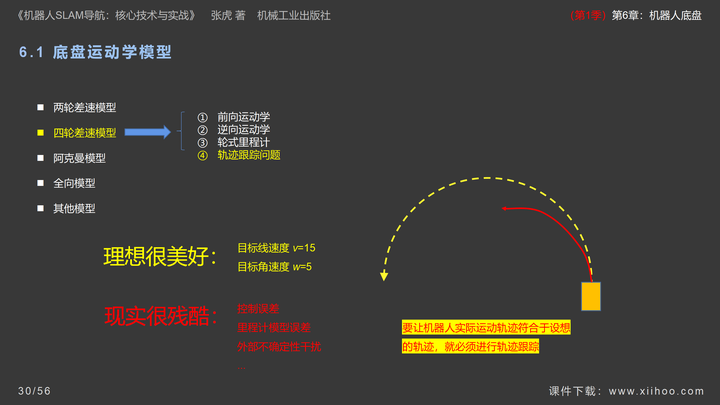
②四轮差速模型
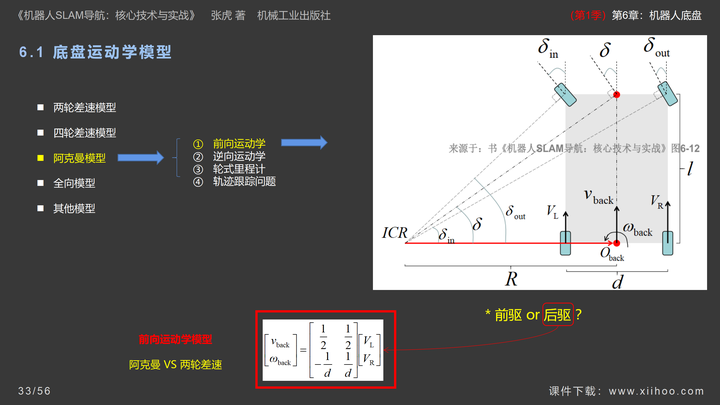
③阿克曼模型
④全向模型
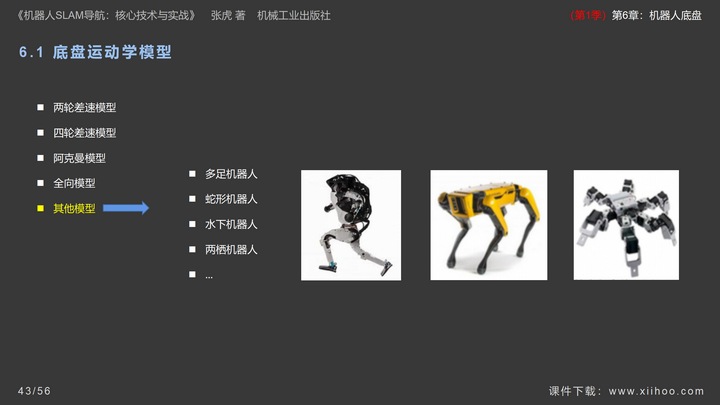
⑤其他模型






























6.2 底盘性能指标
①载重能力
②动力性能
③控制精度
④里程计精度




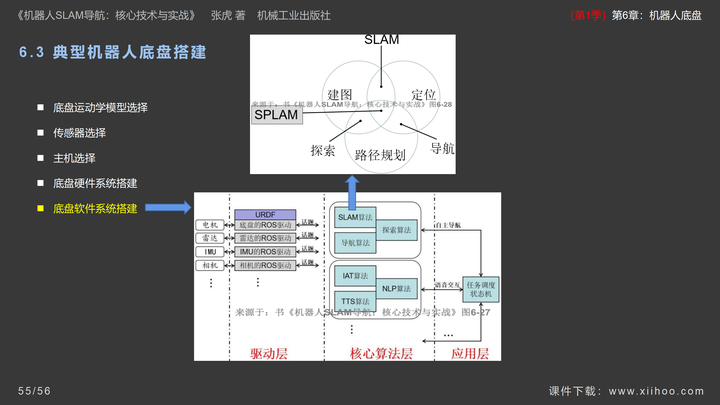
6.3 典型机器人底盘搭建
①底盘运动学模型选择
②传感器选择
③主机选择
④底盘硬件系统搭建
⑤底盘软件系统搭建





Github下载:
Gitee下载(国内访问速度快):
PPT课件下载:
PDF课件下载: